



進給軸帶位置環時多級變速在西門子840Dsl中的實現
2020-3-25 來源:中國第一重型機械股份公司 作者:樊 凱
摘要:進給軸在位置環建立后,如果傳動比突然變化,即變速實現,則最大速度、進給速度、跟隨誤差以及定位精度等都會相應改變,如何平滑順暢實現變速而不引發報警,是一個難題。本文闡述了實現方法。

1.課題必要性
主軸變速功能在所有使用ISO代碼的數控系統中都規定了一些特定代碼和功能,比如西門子840D系列中,輔助應答代碼M41~M45分別代表了主軸的Ⅰ、Ⅱ、Ⅲ、Ⅳ和Ⅴ擋,這些擋位的傳動比參數可以提前預設寫入,為31050和31060,當主軸變速完成后,對應接口信號D B X16.3為1,同時D B X16.0和D B16.1、D B X16.2組合起來反饋當前擋位信號,讀取對應擋位的傳動比和對應擋位的最大速度值,則所有參數都能匹配起來,擋位變換產生的輪廓偏差、定位誤差等都可分別調整,可以實現加工編程中的速度變換。
進給軸多級變換功能則沒那么容易實現,因為840D系統中沒有在參數設計中充分考慮進給軸多級變速功能,對于進給軸變速后的最大進給速度、加速度、定位誤差、輪廓偏差、伺服增益系數和傳動比等都沒有設置對應擋位的參數組,最最關鍵的問題是,西門子沒有相應的接口信號通知NC系統該進給軸當前擋位,無法將實際擋位與參數系統有機結合起來,那么就會出現這種情況,就是進給軸變速后,由于NC無法得知,但速度變化引發的輪廓偏差、定位誤差等會讓進給軸頻繁報警,無法工作。當然了,變速完成后,手動去輸入所有相關參數是可以的,但是,這種方法太低級了,總不能操作人員每次變速完成后,維修人員親自去修改機床參數吧?因此,這不是長久之計。
那么 , 進給軸多級變速是否有必要保留呢?在現代新機床設計中,進給軸多級速度很少看到,因為在新機床設計中,通過電動機功率、轉速、傳動比和安裝空間匹配,可以滿足一臺機床的所有加工需求,不需要有機械變速。但是,在一些舊機床改造中,則不能面面俱到。比如以我改造的一臺SKODA產SUT200型重型臥車為例,原來通過Ⅰ級變速增大輸出轉矩、降低進給速度,用于粗加工;通過Ⅱ級變速提高進給速度、降低輸出轉矩,用于精加工。做改造方案時,如果只保留一個擋位,由于電動機安裝空間極其狹窄,可選擇的伺服電動機不能滿足原有加工需求,要么進給速度太低,要么輸出轉矩不夠,機床的改造就不能取得滿意的效果,所以,必須實現進給的多級變速。
在我最近的數控機床改造過程中,接連發現了三例這種問題,于是,如何平滑穩定實現進給軸多級變速,而且使位置環不報警,這就成了一個重要的問題。經過多次摸索,我們終于攻克了這個難題。
2.實現方法
以SUT200型數控臥式車床為例,刀臺X、Z分別都具有兩級變速,其中,X軸電動機自帶編碼器,外置光柵尺,Ⅰ級傳動比為1∶18,Ⅱ級傳動比為1∶3,Z軸電動機自帶編碼器,外置一個編碼器做位置環,位置環編碼器自帶一個減速箱,Ⅰ級傳動比為1∶6,Ⅱ級傳動比為1∶2,位置環編碼器傳動箱傳動比為2∶5。這兩種情況代表了兩種非常典型的全環方式,分別以這兩種情況描述進給軸多級變速的實現。
(1)光柵尺做位置環,以X軸為例。實現步驟如下。
第一步:檢查傳動比。若機械能夠確切推算傳動比,則可省略此步。進行此步的前提是,與傳動比相關的31050(負載齒輪箱分母)、31060(負載齒輪箱分子)、31064(附加齒輪箱分母)和31066(附加齒輪箱分子)這幾個參數必須設置為默認值1,31030(滾珠絲杠螺距)也按默認值10設置,反向間隙補償32450清掉,且X軸應激活的是不帶光柵尺的第一測量系統(DB31.DBX1.5=1)。
前置條件滿足后,X軸切換到Ⅰ級,在X軸終端壓上一塊百分表,向一個方向開1mm,此時可消除反向間隙,然后百分表清零,再向前開1mm,實際百分表走多些,比如實際百分表動0.2mm,則傳動比為
1∶0.2=5∶1,將此傳動比寫入31064、31066,然后再壓百分表,看是否準確。界面如圖1所示。如果有微量誤差,將傳動比細分為500∶101、5 000∶999等進行嘗試,直到誤差進一步減小到可忽略不計。如果追求更加精確的數顯精度,可以通過激光干涉儀進行螺距誤差補償(LEC)。
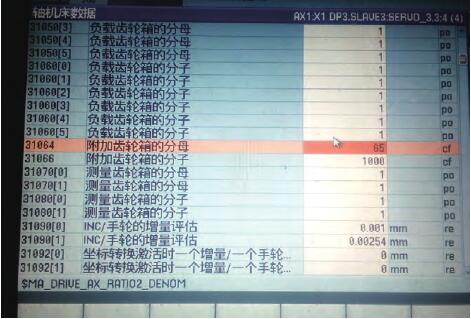
圖 1
記錄下Ⅰ級的傳動比,然后切換到Ⅱ級,將31064、31066清掉,重新進行上述步驟,得到Ⅱ級的傳動比。這里需要特別說明的是,為什么傳動比寫入31064、31066,而不寫入31050、31060 因為31064、31066的生效方式是CF(NEW CONFIG),不需停電重啟,而31050、31060的生效方式是PO(POWER ON),需要停電重啟。
第二步:建立定義文件。得到Ⅰ、Ⅱ級的傳動比后,開始寫定義文件。在840Dsl的“調試”菜單里找到“系統數據”菜單,再找到“定義”文件夾。在該文件夾內新建一個定義文件,默認客戶自定義文件名為MMAC.DEF。打開該文件,在該文件內寫入如下內容:
DEF M51 AS MLX1;書寫M51調用MLX1.SPF子程序。
DEF M52 AS MLX2;書寫M52調用MLX2.SPF子程序。
然后保存退出,則系統開始自動編譯該定義文件,如果文件內容書寫無錯誤,則編譯可順利通過,若編譯不通過,請檢查書寫。這里,MLX1.SPF為X軸Ⅰ級變速子程序,MLX2.SPF為X軸Ⅱ級變速子程序。
第三步:建立變速子程序。定義文件建立后,可以在“制造商循環”文件夾內建立MLX1、MLX2變速啟動子程序。該子程序的作用有兩個,一個是驅動PLC程序進行變速執行元件的動作,比如離合器、電磁閥等;一個是寫變速相關參數,包括傳動比、伺服增益系數和最大進給速度等。
子程序以MLX1.SPF為例,書寫子程序如下:
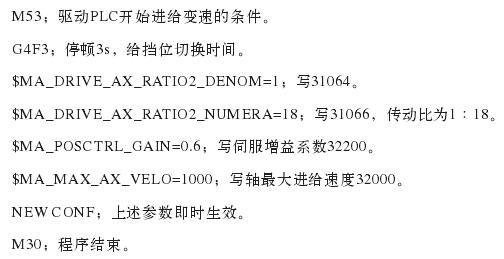
注意上述四個參數的生效方式均為CF,可以使用NEW CONF即時生效,生效方式為PO的則不可以。所以,使用這種方法可寫的參數必須生效方式只能為CF。程序界面如圖2所示。
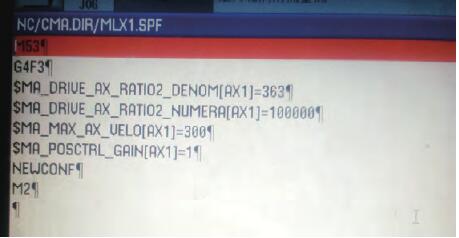
圖 2
第四步:編制PLC程序。NC方面的準備已經就緒,接下來就可以編制PLC程序了。這里,不贅述PLC程序,大家可以根據實際情況自行編制。
第五步:全環試車。上述步驟完成后,則可以進行半環試車,可以看到,當在MDA方式下執行M51時,則31064、31066、32200和32000等自動按照M L X1.S P F內設置而更改;執行M52時,上述參數按照MLX2.SPF內設置而更改。在Ⅰ擋、Ⅱ擋速度下,明顯可以看到同樣的電動機速度,驅動X軸的速度已經按傳動比切換過來。此時,可以激活帶光柵尺的第二測量系統(DB31.DBX1.6=1)。
按照常規設置 , 將 3 1 0 0 0(是否光柵尺)、31040(位置環檢測是否直接安裝到機床上而沒有中間變速)均設置為1,全環設置完成。注意,若31040為0,則NCU會檢測31050、31060的數
值,當掛光柵尺時,會出現輪廓監控報警、不受控制等現象。由于光柵尺直連,31070(編碼器齒輪箱分母)、31080(編碼器齒輪箱分子)默認為1即可。
(2)編碼器外帶減速箱做位置環,以Z軸為例。實現步驟與上面完全一樣,但設置參數有略微差別。31000、31040必須設置為0,同時,31044(編碼器是否有中間變速)必須設置為1。由于編碼器中間有傳動比,31070、31080必須設置。
3.結語
通過西門子840Dsl的配套軟件NC-VAR也可以實現該功能,但需要大量復雜的編程工作,有興趣的同行可以自行嘗試。進給多級變速通過這種方法實現,不僅僅拓寬了設備維系人改造機床的思路,減少了不必要的機械結構修改,而且為其他一些特殊功能的實現提供了更加簡便易行的思路。
參考文獻:
[1] 西門子(中國)有限公司 . 西門子840Dsl簡明調試手冊[Z]. 2012.
[2] 羅永順 . 機床數控化改造技術[M ]. 北京:機械工業出版社, 2013.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

