


引言:為在機床上進一步提高定位精度、提高加工面和加工形狀精度、縮短加工時間,需要進行伺服調(diào)整。而FANUC的高速高精度加工也是相對而言的,沒有絕對的高速高精度。如果要提高精度(跟蹤誤差小),在拐角或圓弧轉(zhuǎn)角處必須減速,這樣就不能達到高速的要求,但提高了速度,必然精度會降低(跟蹤誤差大)。所以如果要兩方面都要提高,必須使用特殊功能。FANUC為αi系列伺服電機提供了更加高速、高精度的HRV3控制方式。下面就HRV3控制原理和調(diào)試步驟簡單介紹:
為通過伺服調(diào)整提高伺服控制的性能,需要理解伺服調(diào)整的步驟,并且按照調(diào)整步驟分階段地進行調(diào)整。伺服控制采用下面的框圖所示的結(jié)構(gòu)。

最靠近電機的伺服HRV電流控制擔負著按照高速速度控制輸出的指令運轉(zhuǎn)電機的作用,伺服HRV電流控制的性能支持高速速度控制的性能。此外,高速速度控制按照位置控制輸出的速度指令對電機速度進行控制,要提高對作為最終目標的位置指令進行跟蹤,需要提高位置增益設(shè)定,為此,需要提高高速速度控制的性能,而要提高該性能,則需要提高伺服HRV電流控制的性能。也就是說,在為提高伺服控制性能的伺服調(diào)整中,改善構(gòu)成伺服控制基礎(chǔ)的伺服HRV電流控制是首先應(yīng)該解決的項目,然后再解決高速速度控制和位置控制。
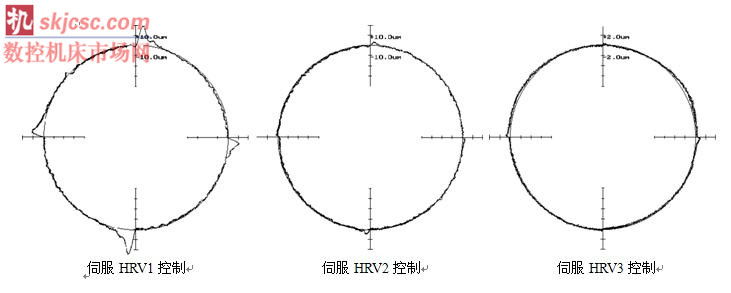
通過進行伺服HRV控制,即可提高電流環(huán)的響應(yīng),從而實現(xiàn)速度環(huán)和位置環(huán)的高增益化。高增益化不僅可提高指令追蹤性能,提高控制外力干擾的性能,而且還有簡化象限突起補償?shù)人欧δ苷{(diào)整的效果,可以使伺服調(diào)整更加簡單。
下圖示出各伺服HRV控制的增益調(diào)整結(jié)果。提高基于伺服HRV控制的電流環(huán)路的響應(yīng),有利于提高速度控制和位置控制響應(yīng),從而在不使用反向間隙加速功能下也能夠減緩象限突起。
在使用伺服HRV3控制之前需先進行伺服HRV2控制設(shè)定,如下表所示參數(shù)。
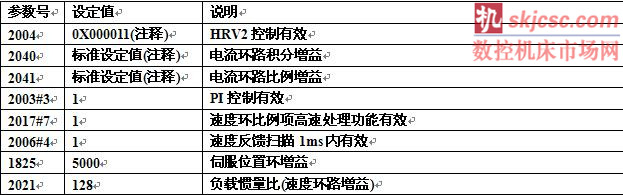
注釋:通過設(shè)定伺服HRV2控制用電機型號就可自動加載最佳參數(shù)。沒有相應(yīng)伺服HRV2控制用電機型號時,可在加載原標準參數(shù)后,修改以下參數(shù):
No.2004=0X000011(X不要改動),
No.2040=原標準參數(shù)×0.8,
No.2041=原標準參數(shù)×1.6,
加載完伺服HRV2用標準參數(shù)后,設(shè)定以下參數(shù),從而得到伺服HRV3控制方式

這樣就可實現(xiàn)速度環(huán)和位置環(huán)的高增益化,既可把位置環(huán)增益(No.1825)設(shè)定在5000左右,速度增益(負載慣量比)(參數(shù)No.2021)設(shè)定在300~128之間。
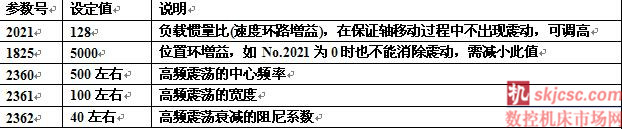
設(shè)定以上參數(shù)之后,機床可以得到良好的輪廓控制,尤其是圓弧加工,效果比較明顯,可以很好的應(yīng)用到立式加工中心上。但是由于機床機械自身的特性不同,以下參數(shù)還需調(diào)整:
伺服初級優(yōu)化以廣泛應(yīng)用在我廠HTC系列數(shù)控車床上,并得到了驗證。以下是HTC3250數(shù)控車床在伺服優(yōu)化前和伺服優(yōu)化后一些數(shù)據(jù)對照表:

但是,由于數(shù)控系統(tǒng)對機械性能的校正和補償是有限度的,所以要得到高速高精度的加工控制,首要條件還是要保證有良好的機械特性,才能夠更好的發(fā)揮伺服優(yōu)化的性能。(文自:沈陽第一機床廠標準型產(chǎn)品管理部技術(shù)室)
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com

查")
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況