


基于 MATLAB 的插床機構運動學和動力學規律分析
2019-9-17 來源: 河南理工大學 機械與動力工程學院 作者:吳雪峰 張惠陽 張洪銘 范玉
摘 要: 插床導桿機構作為一個典型連桿機構,其運動學和動力學分析具有很強的代表性。 通常可利用圖解法對插床導桿機構進行分析,由于手工繪圖過程繁瑣,求解精度有限,很容易產生誤差。 采用矢量解析法對插床導桿機構進行分析,利用矩陣法求解,不僅求解精度高,而且通過繪出機構相應的運動和動力線圖,能形象快速的表達出原動件轉動角度和各構件運動和動力特性之間的關系,具有很大的優勢,便于機構的優化設計。
關鍵詞: 插床; 運動學分析; 動力學分析;連桿機構
0 引言
插床主要用來槽類特征加工。 加工時工作臺上的工件做縱向、橫向或旋轉運動,插刀做上、下往復運動,切削工件。 插床主要由齒輪機構、導桿機構和凸輪機構等組成。 插床導桿機構即插床主運動的機構,由曲柄滑塊為基礎拓展而成,以低副連接形成的單自由度連桿機構。
對插床的導桿機構運動學分析和動力學分析有利于對插床工作性能的把握。 其分析方法分為圖解法和解析法,圖解法能簡單地呈現機構的某一個或某幾個位置的運動和動力特性,精度滿足實際問題的要求。本文利用矢量方程解析法,分析原動件旋轉角度與刀具的位移、速度、加速度,在此基礎上確定出各鉸支座受力以及平衡力矩之間的聯系,進而得到機構整個運動循環過程中的運動學和動力學特性,為后續機構強度和機構形狀設計奠定穩固的基礎。
1 、插床導桿機構的運動學分析
插床導桿機構簡圖如圖 1 所示,該插床導桿機構的工作過程可看作原動件 O2A 桿以等角速度做定軸轉動,并且帶動從動件 AB 桿和 BC 桿做平面運動,最后再帶動插刀 5 沿導路做上、下往復運動,對工件進行切削。
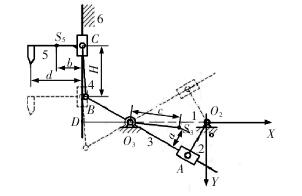
圖 1插床導桿機構簡圖
(1)位置分析在圖 1 所示的機構簡圖中,以 O2為原點建立直角坐標系,并標出各桿矢量及其方位角。利用三角形O2O3A 和四邊形 O3BCD 兩個矢量圖形 ,分別建立矢量方程為:

由式(3)和式(4)即可求得導桿 3 的方位角和滑塊 2 在導桿上的位置,代入式(5)和(6),即可求得連桿 4 的方向角和插刀 5 的位置。
(2)速度分析將式(3)~式(6)對時間求一階導數,并寫成矩陣形式,即得到以下速度矩陣
通過式(7)可得到刀具的速度 v5和構件 2 的相對速度 v23,構件 3 的角速度 w3和構件 4 的角速度 w4。(3)加速度分析對式
(7)對時間求一階導數,便得到加速度矩陣
表 1 機構尺寸及構件重量

插床導桿機構中的滑塊的運動即是插床中刀具的運動,導桿機構尺寸及各構件重量如表 1 所示,利用 MATLAB 軟件計算得到滑塊的運動學分析曲線如圖 2 所示,得到刀具的速度最大為-0.204 m/s(負號表示方向向上),加速度最大為+0.613 m/s2(正號表示與此時速度方向相同)。 刀具在變速運動中產生的加速度會引起慣性力,在刀具加工過程中,此慣性力對刀具產生柔性沖擊,因此在刀具的選擇上還要考慮到柔性沖擊的影響。
2 、插床導桿機構的動力學分析
插床對工件進行切削加工,其對力的要求相對較高,同時機構的約束反力是進行強度分析的基礎。由導桿機構的運動學分析得到各構件的相關構件質心角速度和加速度,可求出構件 3 和構件 5 的慣性力F13和慣性力偶矩 M15。
在用矩陣法對導桿機構進行分析時,通過建立以 O2為原點的平面直角坐標系,然后分別對各個構件列出力平衡方程,對于構件導桿機構中任一活動構件 i,都列出 3 個力平衡方程式,因此導桿機構可列出 15 個力平衡方程式,得到各運動副的約束反力如圖 3 所示。
由圖 3 可以分析出,當切削阻力發生變化時,各鉸支座約束力也會發生迅速變化,切削阻力延 Y 軸正方向,因此各鉸支座 Y 軸分力相對于 X 軸分力更大。

圖 2 滑塊的運動學分析曲線圖

圖 3運動副反力曲線1. FCx2. FCy
3 、利用動能定理求解平衡力矩
由于在一個工作循環中,刀具受力變化將引起主軸的速率波動,需要用飛輪調速,減小電機容量和提高切削質量。 平衡力矩是選用飛輪轉動慣量的重要依據。 本文利用動能定理求解,可避免對于各約束反力求解,簡化計算過程。該導桿機構的運動方程式為
運用動能定理求解平衡力矩不需要展開為矩陣,進行復雜的運算,可以直接帶入 MATLAB 程序中,得到相應的數據結果。 其平衡力矩Mb曲線圖如圖 4 所示。
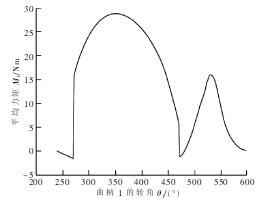
圖 4平衡力矩曲線圖
由圖 4 可以分析出,當切削阻力變化時,平衡力矩也會發生迅速變化。 其中平衡力矩最大值為28.88 Nm,最小值為-1.43 Nm。
4 、結語
為得到插床導桿機構運動學和動力學規律,本文首先對插床導桿機構進行運動學分析和動力學分析,建立其矢量模型,然后利用 MATLAB 軟件的矩陣運算功能,獲得其運動和動力特性,并將結果可視化,獲得插刀的位移、速度、加速度、以及各構件的約束反力隨原動件轉動角度變化的規律,最后,利用動能定理求出平衡力矩。 上述分析方法為插床導桿機構的優化設計奠定理論基礎,同時也為其他連桿機構進行運動學和動力學分析提供了很好的借鑒。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

