


【摘要】在當前工業生產中,激光切割技術廣泛應用于產品的加工與改進,尤其在高精密儀器工件的加工制作方面,有比較大的影響。機器視覺是用機器代替人眼來做測量和判斷的技術,具有比人眼測量和工具測量更精密更便捷的特點。當代激光切割機的應用還存在著一些缺陷,我們設想將機器視覺技術融入激光切割中,開拓它們的適用區間,使它可以應用于更多方面,也使加工步驟更簡便。
【關鍵詞】機器視覺;激光切割;圖像拼接;采集數據
1、 激光切割技術與機器視覺技術
激光切割是用聚焦鏡將CO2 激光束聚焦在材料表面使材料熔化, 同時用與激光束同軸的壓縮氣體吹走被熔化的材料,并使激光束與材料沿一定軌跡作相對運動,從而形成一定形狀的切縫。激光切割技術廣泛應用于金屬和非金屬材料的加工中,可大大減少加工時間,降低加工成本,提高工件質量。激光切割設備通常采用計算機化數字控制技術(CNC)裝置。采用該裝置后,就可以利用電話線從計算機輔助設計(AUTO CAD)工作站來接受切割數據。近年來激光切割作為一門發展極快的高效制造加工技術受到各個國家政府和工業部門的重視,尤其是激光加工設備和激光器的發展成為工程學的一項重要課題。機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統是指通過機器視覺產品(即圖像攝取裝置,分CMOS 和CCD 兩種)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統,得到被攝目標的形態信息,根據像素分布和亮度、顏色等信息,轉變成數字化信號﹔圖像系統對這些信號進行各種運算來抽取目標的特征,進而根據判別的結果來控制現場的設備動作。在此次試驗中,圖像信號提取后會被轉化為CAD 圖形,進而實現導入激光切割設備進行切割。
2 、對激光切割機的改進
2.1 基于原有功能的設想
由計算機圖形學可知,圖像是由圖形元素,即像素組成的二維矩陣。一幅圖像由許多個象素點組成,每個象素點包含著反映圖像在該點的明暗和顏色變化等信息,任何字符和復雜的圖形圖像都可以看做是由點集合而成的像素點陣。目前,使用點陣法獲得圖像的數控雕刻機均采取掃描像素點陣的工作方式,讓雕刻頭裝置(激光束或其他可蝕刻、產生點的機構)與被雕刻材料之間做相對運動,并由計算機按照象素點的明暗信息控制雕刻頭裝置“打點”或“不打點”的兩種工作狀態,使得雕刻頭裝置按所需的圖案軌跡進行刻畫,從而在被雕刻材料上得到由點或線構成的一幅圖像。數控雕刻機的掃描一般是以步進電機為動力, 步進電機將數控系統的數字脈沖信號轉換為直線位移,通過傳動機構帶動雕刻頭裝置作往復直線、間歇的“步進”運動。[1]因此, 普通激光切割機在已獲取切割路徑的情況下可以完成復雜的切割。但是,在擁有實體而缺失圖紙的情況下,制作完全一樣的個體是需要突破的問題,我們設想用一種方式得到實體的圖像數據,并使生成的圖像數據轉化為激光切割信息輸出, 最終實現實體和切割路徑的轉換。獲取圖像數據,圖像采集是第一步工作。較早人們常采用照相機作為圖像捕獲的主要手段,由于相片需要掃描才可用于進一步處理,所以圖像質量不高,直接影響了圖像拼接的結果。數碼相機的應用提高了采集圖像的質量, 同時普通攝像機及CCD 攝像機采集的實時的視頻序列也常用于圖像拼接。圖像獲取方式的不同會導致輸入圖像的不同,最后的拼接結果也不同。圖像采集由照相機拍攝時的運動狀態決定,一般有三種情況:(1)照相機固定在三角架上,旋轉照相機拍攝﹔(2)照相機放置與一個滑軌上,平行移動照相機進行拍攝﹔(3)手持照相機拍攝,站在原地拍攝四周,或者沿著照相機得光垂直方向走動拍攝。[2]在本實驗中采用第二種運動方式。
2.2 改進方法與結構設計
要求在達到目的的同時減少浪費資源,做到快捷高效,我們做出了以下改進設計。我們在激光切割機主控桿裝置上加裝一臺小型工業攝像機,它與激光出射裝置相關聯, 隨激光出射裝置配合切割路徑進行平面運動。如圖1。

圖1 實物圖
2.3 機器視覺對激光加工技術的完善
一般來說,機器視覺技術從大的方面可分為前端的成像技術和后端的圖像處理技術,一個完整的機器視覺系統由光源、鏡頭、相機、采集卡及處理軟件構成(如圖2)。從某種意義上來看,機器視覺在一些領域完全可以取代人眼去觀察一個生產過程的細節部分,這也是機器視覺的功能的重要體現———把某些人眼無法看到的生產加工過程以圖像的形式在計算機上呈現在生產加工人眼的眼前。如果機械視覺應用得當的話,它將更大程度地提高工作效率,縮短工作時間,這也更符合當今世界的生產理念。
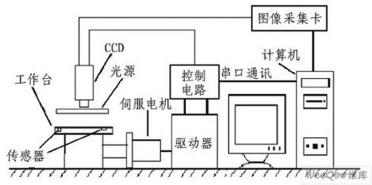
圖2 機器視覺組成結構圖
2.4 操作方案
設置好拍照參數,在拍攝樣品時使樣品水平放置在操作臺上,為激光切割機輸入特定的路徑,使之按照規定路線進行小幅圖像的拍攝(此時關閉激光)。
2.4.1 對樣品切割信息的提取
’
激光切割機可以快捷高效的完成對輸入圖像的切割,但是對于復雜且沒有切割信息的樣品,我們首先要完成的是對樣品切割信息的提取。第一步,獲得清晰的圖像。我們依靠工業相機來完成,由于激光切割對數據的準確度要求較高,拍攝單幅圖像時會發生圖像邊緣部分發生細微形變的情況,或因為視角的傾斜程度、拍攝角度等問題產生失真,我們解決的方法是使工業攝像機平行于切割面進行路線合理的平行移動,每隔一定的距離進行一次拍攝,從而得到一組該樣品的切割面平面圖像。
2.4.2 圖像的編輯與設置
獲得圖像后開始進行圖像的規范,我們需要把這組圖像經過圖像拼接、圖像融合等技術轉化為一幅完整的可以進行工作的圖像。本文采用了2004 年David Lowe 改進的SIFT[5]算法完成圖像序列特征點的提取。SIFT 算法是一種電腦視覺算法,它在空間尺度中尋找極值點并提取出位置、尺度、旋轉不變量。SIFT 算法又稱尺度不變特征點提取方法,其實現主要包含4 個步驟:①檢測尺度空間極值﹔②精煉特征點位置﹔③計算特征點的描述信息﹔④生成本地特征描述符。得到的特征點具有尺度不變性,能夠正確的提取尺度和視角變化較大的圖像序列中存在的特征點,有效地克服了輸入圖像中的噪聲干擾。下一步驟圖像配準采用的是基于特征點的圖像配準方法,即通過匹配點對構建圖像序列之間的變換矩陣,從而完成全景圖像的拼接。為了提高圖像配準的精度,本文采用了RANSAC[6],LM 等算法對圖像變換矩陣進行求解與精煉,達到了較好的圖像拼接效果。最后進行圖像融合,進行圖像拼接縫合線處理的方法有很多種,如顏色插值和多分辨率樣條技術等。有以上過程可以得到完整圖像。
![]()
圖3 圖像處理流程
啟用Photoshop 參照激光切割機操作手冊進行圖像預處理, 處理完成后選擇“圖像/旋轉畫布/水平翻轉”將圖形翻轉,在“文件/存儲副本”中以“BMP”格式保存圖形,圖形處理完畢可以在設定參數后輸入激光切割機進行工作,從而得到與樣品一模一樣的成品。對激光內雕機來說,軟件系統包含三維圖形處理軟件,三維圖形編輯軟件可以導DXF,BMP,JPG,GIF,PLT 等文件格式進行處理,同時顯示三維圖形在XY,YZ,XZ 平面的投影以及整個立體圖形。可以手工對圖形進行相關的處理,以滿足自己的要求。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

