圖像測量是一種采用CCD( 電荷耦合器件) 進行攝像測量的新型光電測量技術, 它是將CCD器件與光學儀器聯用, 應用于測量領域而形成的。圖像測量技術是以現代光學為基礎, 融計算機圖像學、信息處理、計算機視覺、光電子學等科學技術為一體的現代測量技術, 它把被測對象的圖像當作檢測和傳遞信息的手段, 從中提取有用的信號來獲得待測的參數。
近年, 圖像測量技術在國內外發展很快, 已廣泛應用于幾何量的尺寸測量、航空遙感測量、精密復雜零件微尺寸測量和外觀監測、光波干涉圖、應力應變場狀態分布圖等和圖像有關的技術領域。本文將圖像測量技術用到零件尺寸參數的測量之中,并為了提高測量系統的精度, 提出了一種先在Sobel算子的基礎上去掉局部非極大值點獲得象素級邊緣, 進而在梯度方向上進行高斯曲線擬合插值, 進一步提高圖像邊緣定位精度, 從而使測量系統精度大大提高的方法。
1 測量系統的構成
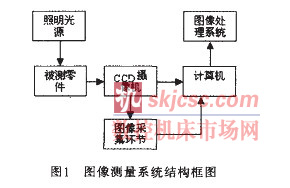
圖像測量系統是集光學、光電子學、精密機械及計算機技術為一體的綜合系統。高精度零件尺寸測量系統由CCD攝像機、圖像卡、計算機及圖像處理軟件等組成, 再加上相應的照明系統、接口硬件, 結構框圖如圖1所示。其工作過程為: 將被測零件置于盡可能均勻照明的可控背景前, CCD和圖像卡將被測零件圖像采集到計算機里, 計算機按一定的算法計算出被測物體的幾何參數, 最后, 計算機對這些數據進行各種處理并將結果按一定的要求予以顯示和存儲。
2 測量算法
在圖像測量系統中, 圖像邊緣的檢測是整個測量的基礎和關鍵。圖像邊緣檢測精度高, 整個測量系統的精度就可大大提高。零件的輪廓通常產生階躍型邊緣, 因為零件的圖像強度不同于背景的圖像強度。對于階躍型邊緣的檢測, Canny算子邊緣檢測效果比較好, 但算法復雜;Marr提出用二維高斯加權函數對原始圖像作平滑, 然后檢測二階方向導數作為邊緣點, 過濾了噪聲, 但可能將原有的邊緣也給過濾掉了[1] ; 利用Sobel算子檢測邊緣方法簡單, 處理速度快, 得到的邊緣光滑、連續。雖然得到的邊緣較寬, 但在其梯度圖像中去除非局部最大值點, 就可以檢測出更精確的邊緣。
為滿足圖像測量的需要, 本文先在Sobel算子的基礎上去掉局部非極大值點獲得象素級邊緣, 進而在梯度方向上進行高斯曲線擬合插值, 進一步提高圖像邊緣定位精度到亞象素級, 從而大大提高測量系統的精度。
2.1 象素級邊緣提取
象素級邊緣提取是指用象素級的邊緣檢測算子對目標初步定位, 得到象素級精度的定位過程。本文利用Sobel算子, 在梯度方向上去除非局部最大值點, 成功地獲得了象素級邊緣, 取得了較好的效果。具體的步驟如下。
( 1) 用Sobel算子對去噪后的圖像g( i, j) 進行卷積, 得到卷積圖像。
( 2) 計算圖像中每一點的梯度方向值θ, 其計算公式為: θ( i, j) =tan- 1( f ′y / f ′x) , 這樣就可以得到圖像中每一點的梯度方向值。根據離散數字圖像的特點, 將θ分成四個方向范圍: 0( 水平方向) : 0°—22.5°以及157.5°—180°; 45( 45方向) : 22.5°—67.5°; 90( 豎直方向) : 67.5°—112.5°; 135 ( 135 方向) : 112.5°—157.5°。
( 3) 對梯度圖像中的所有邊緣點, 在每一點的3×3鄰域中, 將中心象素梯度值與沿梯度方向的兩個象素梯度值進行比較, 若在鄰域中心處的幅值比沿梯度方向上的兩個相鄰點的幅值大, 則此點為邊緣點, 否則, 此點為非邊緣點, 賦值為0, 從而得到單象素邊緣圖像。
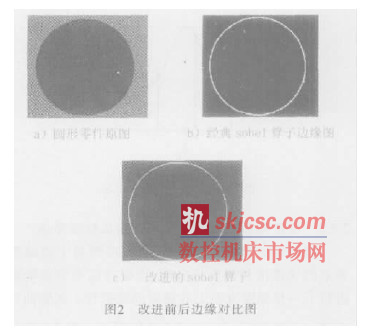
圖2是利用Sobel算子在改進前后得到的微孔零件圖像的邊緣圖。從圖2中對比結果可以看出, 經典Sobel算子獲得的圖像邊緣比較寬, 而利用改進的算子獲得的圖像邊緣較細, 達到了單象素級水平, 取得了比較滿意的效果。
2.2 亞象素邊緣定位
圖像邊緣可以精確到一個象素點, 這樣, 邊緣點坐標可以近似地為像元的幾何中心位置。這時系統的測量精度由CCD感光部分的像敏元間距決定。因此, 圖像測量系統的測量精度, 在不考慮像差等因素的情況下, 主要取決于CCD攝像機的分辨率。為了提高測量系統的精度, 提出了一種概率統計細分方法來提高CCD尺寸測量分辨率, 提出了解調測量方法來提高CCD尺寸測量分辨率, 提出應用概率論方法來提高CCD尺寸測量分辨率, 提出應用多項式插值函數來提高CCD尺寸測量分辨率等等。本文提出在梯度方向上進行高斯曲線擬合插值進一步提高圖像邊緣定位的精度, 從而使測量系統的精度大大提高的方法。
2.2.1 高斯曲線擬合原理分析
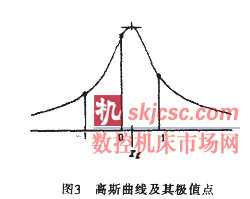
在圖像邊緣梯度方向上, 灰度梯度呈一個高斯曲線分布。若用邊緣檢測算子直接提取圖像邊緣, 則只需找出灰度變化最大的象素的坐標就可以了。但是, 灰度變化最大的象素坐標不一定是這個高斯曲線的極值點, 而且可以說往往不是極值點, 如圖3所示, 我們往往認為0位置點就是圖像的邊緣點, 但從圖中可以很明顯地看出來, 實際的邊緣位置點不是0點, 而是xg點。對于一個圖像測量系統來說, 若認定0位置點就是我們所要找的邊緣點, 這往往達不到系統測量的精度。為了提高系統測量的精度, 必須找到xg點的準確位置, 這可以通過采用亞象素細分算法來精確定位xg點。在圖3中, 0點的梯度值最大設為F0, - 1點和1點的是在梯度方向上緊挨0點的左右兩點, 設它們的梯度值分別為F- 1和F1, 通過這三個梯度值擬合出一條高斯曲線, 然后通過求導來取得其極值點, 則對應極值點的坐標點xg即為圖像邊緣的精確定位點。
2.2.2 梯度方向上高斯曲線擬合插值細分算法
通過Sobel算子可以很方便地得到每個邊緣象素點的梯度值和梯度方向值, 根據這兩個值就能夠進行下一步梯度方向上的高斯曲線擬合。高斯曲線的表達式為![]() 其中u為均值, σ為標準差。直接對此式進行擬
其中u為均值, σ為標準差。直接對此式進行擬
合很困難, 可以把高斯曲線作變換, 兩邊取對數, 有下式成立
![]()
可以看出上式形如y=Ax2+Bx+C, 是一條典型對x的二次曲線。這樣就能用取對數后的值來擬合出拋物線, 求出頂點坐標, 使計算大大簡化。
為了求出梯度方向上二次曲線的形式, 我們采用曲面擬合的觀念: 先用一個二元二次多項式去擬合邊緣點附近鄰域內象素梯度的對數值, 得到曲面擬合函數, 然后再通過曲面擬合函數來得到二次曲線形式。通常, 我們利用邊緣點附近3×3鄰域象素點來計算參數, 當然也可以加大區域取點范圍, 這樣求出的曲面函數效果也比較好。但是, 這會增加檢測時計算的復雜度, 且增加的效果不是很明顯。所以我們通常采用邊緣點附近3×3鄰域象素點來計算參數。
設曲面擬合函數為:
f( x, y) =k0+k1x+k2y+k3x2+k4xy+k5y2 ( 2)
其中的x, y為象素點的坐標值, f( x, y) 為在象素點( x, y) 處梯度大小的對數值。所以, 關鍵是計算方程( 2)中曲面擬合函數的系數, 可用最小二乘法求出系數k0, k1, ?, k5的值, 然后運用公式( 4) 就可以求出邊緣點的準確位置。
根據最小二乘原理( 殘差平方和最小) , 有:】
![]()
最小化誤差后, 就可以求出系數k0, k1, ?, k5的值。以邊緣點為中心, 建立極坐標系, 將x=ρcosθ, y=ρsinθ代入所得的曲面擬合函數里, 得到在梯度方向上關于極徑的二次曲線方程, 對這個方程求取其極大值, 即可得到準確的邊緣點的位置:
![]()
在上面求解k值的過程中, 需要注意到的一點,就是二次曲線是由原高斯曲線取對數后得到的, 因此求解時應將象素點的灰度梯度值用其對數值代替。這樣, 邊緣點亞象素位置的提取公式為:
3 實驗結果
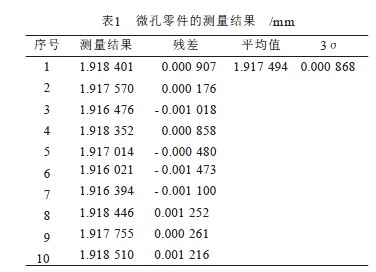
本課題實驗采用的是型號為MTV- 2821CB的黑白CCD攝像機, 工作臺是JX14A數字式工具顯微鏡。圖2中a) 圖是通過CCD攝像機拍攝到的精密小孔原圖, 測量時, 通過前后左右移動工作臺, 使小孔在成像視場中的位置發生變化, 采樣10次, 運用本文所提出的方法測量小孔的直徑, 得到的實驗數據如表1所示。
從表1的測量結果中可以看到, 測量結果的精度達到了0.868 μm, 取得了比較好的效果。
4 結論
本文首先提出了高精度零件尺寸測量系統的結構、工作原理等問題。然后提出了一種在Sobel算子的基礎上去掉局部非極大值點來快速獲得象素級邊緣的方法, 進而提出在梯度方向上進行高斯曲線擬合插值來提高測量系統的精度, 從實驗結果中可以看出, 取得了比較好的效果。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com








