



基于機床數控系統的電主軸控制技術
2022-11-1 來源:沈陽機床(集團)有限責任公司 作者:張弛
隨著機床產業的不斷發展,電主軸的應用越來越廣泛。電主軸上配置星角切換裝置后,不但具有低轉速時高扭矩,還具備高轉速時大功率的特性。高速運轉的電主軸的主軸型式是將主軸電機的定子、轉子直接裝入主軸組件的內部,即把高速電機置于精密主軸內部,電主軸的電機轉子就是主軸,主軸的殼體就是電機的機座,實現了變頻調速電機和主軸一體,電機直接驅動主軸,形成電主軸。
電主軸取消了電機到主軸傳動鏈中的齒輪、皮帶等中間環節,動力源對主軸的直接傳動,傳動鏈長度為零,實現了機床主軸系統的 “零傳動”,具有高轉速、高精密、噪聲低、低溫升、體積小、安裝方便等特點,是現代高檔數控機床主要的關鍵部件。它與早年應用于內圓磨床的內裝式電機主軸的區別是采用了變頻調速技術,主軸有較大的驅動功率和轉矩,并有一系列監控主軸振動、軸承溫升等參數的傳感器及其檢測控制系統。因此電主軸及驅動系統是一種技術含量很高的機電一體化產品,涉及機械、電機、驅動與控制、支承、潤滑、材料熱處理及振動等諸多領域,是一套相對獨立、完整的智能型功能部件。
本文基于機床數控系統的研究,研究了兩種控制電主軸星角切換的方法,第一種方式是通過PLC 邏輯控制程序,并在加工程序中編輯相應 M代碼實現電主軸的星角切換 ; 第二種方式是通過數控系統 SINAMICS BICO 連接技術實現電主軸星角切換。
1. 邏輯程序控制的星角切換
邏輯程序控制電主軸星角切換首先繪制控制電主軸星角切換的電氣原理圖(見圖 1),其次是調用數控系統的星角切換功能塊,最后編輯數控系統主軸部分星角切換的電機參數。
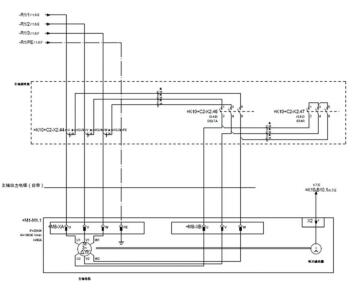
圖 1 星角切換原理圖
(1)星角切換原理
如圖 1 所示,接觸器 K2.46 吸合,電主軸角連接 ; 接觸器 K2.47 吸合,電主軸星型連接。
(2)邏輯控制程序
機床數控系統中集成了控制星角切換的功能塊 FC17,編輯功能塊生效的條件,如下所示 :
AN DB20.DBX 140.0; 是否調用星角轉換功能塊
JC M003;DB20.DBX 140.0=1 星角轉換生效

綜上所述,在 MDA 或 AUTO 方式下,執行M54 時,切換到星連接 ; 執行 M55 時,切換刀角連接。特點是操作簡單,執行 M 代碼就可實現電主軸的星角切換,但是切換時需要主軸停下來。這樣就降低了機床的工作效率。
(3)星角切換主軸參數設置
由于參數設置與數控系統 SINAMICS BICO連接技術的參數設置基本相同,這里就不贅述了。
2. 數控系統 SINAMICS BICO 連接技術控制星角切換
(1) 控制原理
星角切換控制原理圖如 2、圖 3 所示,接觸器 Q120A 吸合,數控系統 NCU 上 X122.9 輸出繼電器 K120A 吸合,從而實現接觸器 Q120A 吸合,電主軸星型連接,接觸器 Q120A 的反饋觸點將星型連接的狀態反饋到 X122.4; 數控系統NCU 上 X122.10 輸出繼電器 K120B 吸合,從而實現接觸器 Q120B 吸合,電主軸三角型連接,接觸器 Q120B 的反饋觸點將角型連接的狀態反饋到 X122.3。
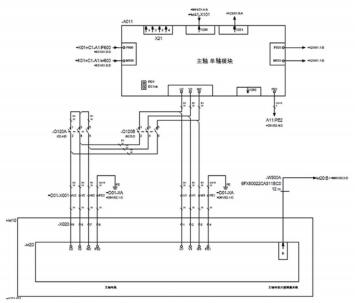
圖 2 電主軸星角連接原理圖
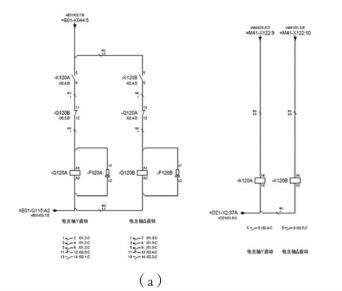
圖 3 電主軸星角切換原理圖
(2)X122 特性設置
如星角轉換原理圖所示,X122.3 為角型連接的接觸器反饋,X122.4 為星型連接的接觸器反饋;X122.9為星型連接接觸器吸合輸出,X122.10為角型連接接觸器吸合輸出。那么,數控系統的 X122.3/4 應設置為輸入端口(默認),X122 的9/10 設置為輸出(需要設置控制單元數據更改為輸出端口)。X122 端口特性如表 1 所示。
表 1 數控系統 X122 接口特性
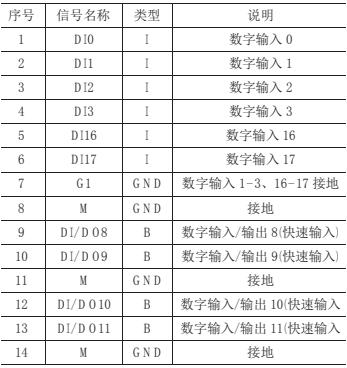
因為 X122 是控制單元 NCU 上的接口,所以要設置控制單元數據,控制單元參數 p728(CU數字輸入輸出狀態)根據電氣原理圖需求設定,X122.3/4 為數據輸入點(默認),9/10 為數據輸出點(相應位設置為 1,代表更改為輸出端口)。
(3)增加驅動數據組 / 電機數據組
配置時,對電主軸星角分別對應的參數要進行分別配置,因為星角切換相當于電主軸擁有兩套驅動數據(DDS),在低轉速大扭矩時切換到星型連接,在高轉速大功率時切換到三角型連接。因此在配置星角兩套電機數據時,首先要添加數據組(見表 2),然后進行分別配置星型連接電機參數和角型連接電機參數,并分配電機編碼器數據。
表 2 數據組

數據組擴展完畢,主軸驅動參數中的下列參數會自動設置 :
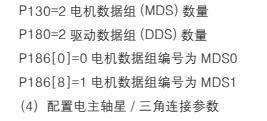
(4)配置電主軸星 / 三角連接參數
按照星角兩套數據組分別添加星角切換的兩套電機參數,以 KESSLER 品牌的 18000r/min的電主軸星角切換的電機驅動數據為例,如表 3所示。
表 3 KESSLER 18000r/min 電主軸星角切換的電機參數
分別在各個參數的 [0] 輸入星型連接電機參數,在 [1] 處輸入角型電機參數。另外,從上表中可以看出,星角切換的臨界轉速為 4700r/min。
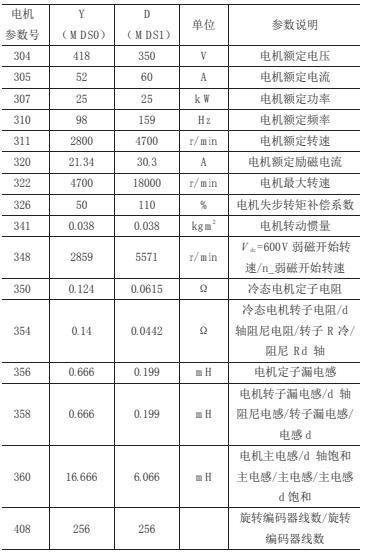
(5)星角切換關聯參數
控制單元參數的設置如表 4 所示。
表 4 控制單元數據的設置
主軸驅動數據 :p820[0] 驅動數據組選擇DDS 位 1/ 選擇 DDS 位 1。設置為 63:2197.2,即當主軸實際轉速小于等于轉速閾值p2155中的設定值時,p820[0]=0,DDS0([0])數據組生效 ; 當主軸實際轉速大于轉速閾值 p2155 中設定的值,p820[0]=1,DDS1([1])數據組生效。
參數 r0051 中顯示激活的驅動數據組 DDS。p820參數特性如圖 4 所示。
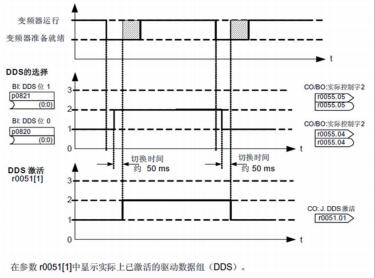
圖 4 參數 p820 特性
注意 : 在更改上述參數時,只有把參數 p922改成 999 自定義報文,不能再改回原來的 136 報文,否則參數 p820 參數更改失敗。
星角切換延時時間,推薦 100ms,只有在出現星角切換時間報警時設置,否則可不設置。
p2155[0] 電主軸星角切換轉速閾值 從KESSLER 電主軸參數表中顯示應設置 4700r/min;
p2155[1] 電主軸星角切換轉速閾值 從KESSLER 電主軸參數表中顯示應設置 4700r/min;
p2140[0] 轉速閾值回差,磁滯速度,不應太小,推薦為 90r/min;
p2140[1] 轉速閾值回差,磁滯速度,不應太小,推薦為 90r/min;
p2000 電主軸最大轉速,從 KESSLER 電主軸參數表中顯示應設置為 18000r/min,配置完成后,該參數應該自動寫入最大轉速 18000r/min,如果沒有自動寫入,可手動輸入。
3. 結束語
綜上所述,PLC 邏輯控制程序控制的星角切換,每次切換時,主軸會將速度降為 0,再進行切換,會花費機床加工時間,降低機床工作節拍和工作效率 ; 數控系統 SINAMICS BICO 連接技術控制的電主軸星角切換,實現了切換時的無級變速,節約了時間,提升了機床的工作效率,推薦使用這種切換方式。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

