



一種智能化定位測量系統
2017-8-3 來源:中國飛行試驗研究院 作者:何紅麗
摘要:根據試驗測試需求,設計一種集點、線、面為一體智能化高精度三維坐標定位測量系統。該系統主要應用于飛機結構性能檢測以及工業現場標定中,具備測量仿真、在線校準、在線測量、快速處理、實時監控的功能,給出系統構建思路、框架、組成,并對關鍵技術問題進行剖析;在實驗室利用全站儀、影像測量設備等搭建一個綜合測試平臺,驗證了設備接口信息互操作性、實時引導、坐標轉換、平差處理等關鍵功能,其功能、性能均滿足測試需求。系統的建成將有力助推飛行試驗智能化測試技術的發展,對提高測試精度、速度,節省人力、物力都具有非常重要的作用。
關鍵詞:三維模型;智能測量;系統設計;測量仿真
0.引言
飛行試驗空間定位測量是在真實試驗環境下,對航空飛行器及附件等位置參數進行測量[1],其主要應用于飛機結構性能檢測以及工業現場標定中。近幾年來隨著數字化測量技術進入制造領域,其在測量、檢測、裝配、校準等領域發揮的作用越來越重要,尤其是對于尺寸大、產品結構復雜、制造工藝要求高、生產速度要求快的各類型航空武器系統。在航空武器系統的測量中,既要測量飛機、武器本身的位姿信息,還要測量飛機與武器之間的相互關系;測量精度要求高,測量任務多,測量頻度高,每年測量上百架次;測量由原來的靜態轉換為動靜結合;且隨著科學技術的發展,測試向著數字化、綜合化、集成化、標準化、在線化等智能化方向快速發展[2]。
要快速實現上述測量需求,智能化測試系統的研制是必然選擇。沒有有效的測量手段就不可能實現在線自動化檢測,只有通過智能化測試系統的構建,才可提高試飛測試精度、速度,節省人力、物力。本文主要針對空間定位測量需求,跟蹤國內外智能化測試技術發展趨勢,設計滿足未來武器發展需求的高精度空間三維點、線、面一體化智能測量系統。該系統需具備仿真計算、在線校準、在線測量、快速處理、實時監控的功能,可實現飛機模型構建,武器系統在飛機上的安裝過程在線檢測、復雜體的定位及試驗現場監控,為現場測試、決策提供依據。
1.系統架構設計
1.1 基本框架
依據飛行試驗所需,采用先進的數字化測量設備如全站儀、光學坐標測量儀、三維掃描儀、激光跟蹤儀等多測量設備聯合作業,以期解決飛機結構性能檢測和工業現場標定問題。構建思路是基于三維模型,通過計算機、自動控制等技術,實現對被測對象的一體化測量[3];通過離線編程進行設備的布局與任務規劃,系統建成后可在線檢測、在現場進行數據處理,縮短處理周期,提高測量數據的有效性和準確性。在測量平臺構建過程中充分考慮系統的先進性,系統構建既要具有數據處理、操控功能,同時要能夠對測量設備布局進行優化,對測量任務軌跡線路進行規劃,在確保精度的情況下完成自動化測量。系統框架如圖 1 所示。
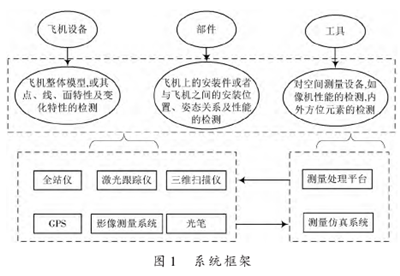
1.2 系統組成
針對飛行試驗機庫特點,構建智能化高精度定位測量系統,實現特征點、線、面數據的快速自動化采集、記錄、計算、結果報表生成等功能。智能測量系統主要由5 個分系統組成:精確點測量分系統、影像測量分系統、三維建模分系統、測控中心分系統、測量仿真分系統。其中精確點測量分系統、三維建模分系統、影像測量分系統實現信息的采集與獲取;測控中心分系統是整個系統的核心,負責數據處理、操控、引導、分析、顯示等功能;測量仿真分系統主要完成測量設備的布局、組合以及測量路徑的規劃,是進行系統優化配置的關鍵,同時也是自動化測量的基礎。具體組成如下:
(1)精確點測量分系統。由全站儀、光學坐標測量儀、激光跟蹤儀等設備組成,主要實現對被測對象特征點測量。
(2)影像測量分系統。由攝像機、鏡頭、解析軟件等組成,利用近景攝影原理對目標關鍵點進行測量,可以給出靜態或動態測量過程目標點的測量結果。
(3)三維建模分系統。包含三維掃描儀,模型構建工具等,主要用于模型構建或者是目標的測量及姿態求取。
(4)測控中心分系統。主要實現對系統中的相機、三維激光掃描儀以及全站儀等設備的后臺操作控制和信息實時采集、引導發送、處理、評估、顯示等,具備圖像處理、數據處理、參數解析以及平差計算等功能。
(5)測量仿真分系統。根據測量任務的要求及現場環境知識建立仿真模型,對測量特性進行仿真計算,通過仿真給出某個特定任務中參與測量的測量設備的組合、布局、測量任務的規劃,是系統優化配置的關鍵。主要用于任務的準備,模擬測量現場,對設備布局,設備干涉、測量軌跡路徑的模擬,對測量方案及計劃進行確認。
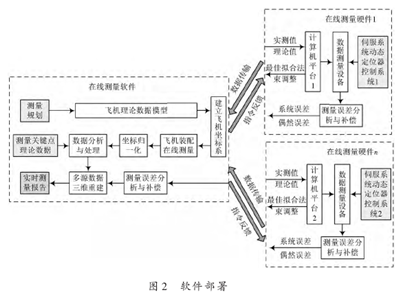
1.3 軟件規劃
對于一項測試,要進行智能化測量,任務部署規劃很重要。首先通過測量仿真,獲取測量規劃,然后再依據規劃進行在線化測量及結果報表的生成。軟件功能的部署如圖 2 所示。
2.關鍵技術
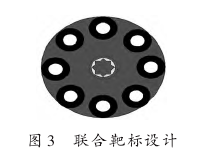
2.1 聯合靶標的合理設計、布置和測量
一個由多測量設備構成的綜合測量系統要獲取高精度的測量結果,首先要根據觀測對象條件來確定聯合靶標設計及布局,以確保測量體系的統一。在這一過程中,需要充分考慮多種測量設備對測量標志的識別特點,考慮測量對象的尺寸規模、標志點的結構特點。為此進行了聯合靶標的設計,讓所有測量設備信息可以劃歸在統一測量體系。設計的聯合靶標如圖 3 所示,由反射棱鏡和圓形回光反射標志點構成,其中反射棱鏡可以由激光跟蹤儀或全站儀識別,而圓形回光反射標志點可以由影像測量設備、三維掃描儀識別,然后通過解析算法,依據反射棱鏡的中心把所有的測量點劃歸在同一個參考中心。要提高測量精度,在布局過程中要獲取多樣性的觀測數據。多樣性的觀測數據是其平差模型準確的基礎。在布控時考慮測量過程中的盲區分布、光學單元可利用的空間分布、光學測量系統的光源布置等。
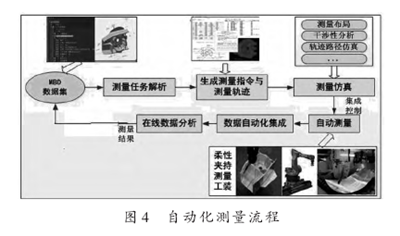
2.2 基于模型的智能化測量流程設計
智能化測量流程設計是基于數字化三維仿真模型[4 5]。首先對測量任務需求進行解析。根據相關測試要求進行測量指令的生成,依據現場環境,通過測量仿真進行測量設備的選取、組合與布局。根據仿真生成的測量規劃進行集成控制及自動化測量,在測控中心完成所有測量數據的采集和計算,構建統一的坐標體系、數據解算,完成在線測量與分析,最終給出測量結果。自動化測量流程如圖 4 所示。
2.3 測量仿真
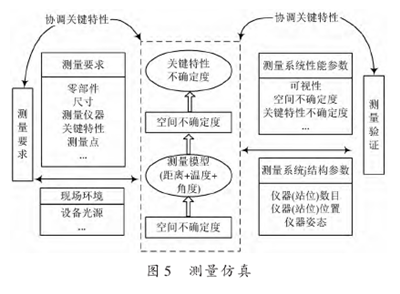
測量仿真是實現智能測量的首要條件,在復雜試驗現場環境下,建立合理的測量場模型是測量規劃與系統優化配置的基礎和關鍵[6?7]。總體上,測量場模型要根據測量任務的要求及現場環境模型而建立,其中應包括工作空間、零部件、障礙物、測量目標、測量儀器、測量空間內的環境因素等信息。對測量系統按照不同布局或配置方案組合,通過仿真將形成不同的測量場結果,由此可以在現場實際測量實施之前評價測量系統的性能參數并得到優化的結構參數,驗證測量場模型和試驗需求相符性,在仿真過程中著重關注可視性與精度特性。測量仿真過程如圖 5 所示。
2.4 自動化測量過程
自動測量用到的設備有跟蹤設備(跟蹤儀,全站儀),采用“坐標值轉換設備自動驅動自動找點數據采集”的方式實現自動瞄準測量[8]。首先基于三維數/模獲取各測量點在設計坐標系下的理論位置,計算設計坐標系與測量坐標系的轉換關系,獲得當前實際狀態下各個測點在測量坐標系下的理論坐標值,通過程序控制測量設備自動定位到要采集的測量點附近,使跟蹤儀自動精確搜尋到靶球靶心,完成測量,然后進入下一個所需點的搜索并測量。
3.驗證
利用全站儀、影像測量系統等組建了一個綜合測量平臺,通過該系統驗證了實時引導、坐標轉 換 、平 差 處 理 等 關 鍵 功 能 。 利 用 開 發 的 軟件可穩定操控設備進行測量、融合精度優于單獨設備精度;測量范圍得到拓展。同時在多個型號測試驗證了多測量設備組合自動化測量模式,實現了在線測量,提高工作效率與測量的可靠性。
4.結語
采用多測量設備可以構建大尺寸智能化定位測量系統,該系統建成之后,可以實現常規任務在線快速測量。智能化測量是一個系統工程,要達到智能化測試目標,需要統籌規劃、補點建線構面、逐步實施。中國飛行試驗研究院按照此思路正在開展智能化測試工作的逐步推進,系統的建成將有力助推飛行試驗智能化測試技術的發展,對提高測試精度和測量速度,節省人力、物力都具有非常重要的作用。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

