


精密研拋數(shù)控機(jī)床幾何誤差與熱誤差復(fù)合建模及其補(bǔ)償研究
2016-11-10 來源:長春工業(yè)大學(xué) 作者:張恩忠,李剛,林潔瓊,冉同歡
摘要:為了提高精密研拋數(shù)控機(jī)床的加工精度,對研拋數(shù)控機(jī)床的幾何誤差與熱誤差進(jìn)行了研究與分析,發(fā)現(xiàn)隨著機(jī)床相關(guān)部件溫度的不斷升高直至熱穩(wěn)態(tài),機(jī)床的定位誤差也不斷增加到穩(wěn)態(tài)值,驗(yàn)證了幾何誤差和熱誤差是精密及超精密加工誤差的主要來源。綜合考慮了機(jī)床復(fù)合誤差的不同特點(diǎn)并進(jìn)行誤差分離,提出了基于牛頓插值算法和最小二乘法的幾何與熱復(fù)合誤差建模方法,依據(jù)復(fù)合誤差模型進(jìn)行補(bǔ)償實(shí)驗(yàn), 補(bǔ)償后機(jī)床冷態(tài)下定位誤差值從3. 5μm 降至1. 2μm, 誤差降低了65. 7%,熱穩(wěn)態(tài)后定位誤差值從12. 2μm 降至1. 9μm,誤差降低了84. 4%,實(shí)驗(yàn)結(jié)果證明復(fù)合誤差模型計(jì)算簡單、預(yù)測精度高、具有較好的魯棒性,為提高機(jī)床的加工精度提供了理論與實(shí)踐依據(jù)。
關(guān)鍵詞:研拋數(shù)控機(jī)床;插值算法;復(fù)合誤差模型;誤差補(bǔ)償
0.引言
由機(jī)床本身制造、裝配精度引起的幾何誤差和由機(jī)床在加工過程中熱變形引起的熱誤差是影響數(shù)控加工精度的關(guān)鍵因素。在精密、超精密加工中,數(shù)控機(jī)床的幾何誤差和熱誤差約占總誤差的70% [1-2] ,其中熱誤差是影響機(jī)床加工精度的主要因素。數(shù)控機(jī)床熱誤差形成的原因多種多樣,其中包括機(jī)床所處的加工環(huán)境、機(jī)床上各種熱源影響、人為造成的因素等,國內(nèi)外學(xué)者對數(shù)控誤差建模和補(bǔ)償方法進(jìn)行了廣泛研究,文獻(xiàn)[3]趙幗娟等建立了四軸拋光平臺的綜合誤差模型并分析其誤差的主要來源、文獻(xiàn)[4]韓飛飛等對數(shù)控機(jī)床的幾何精度進(jìn)行了綜合分析,并驗(yàn)證了定位誤差是影響機(jī)床幾何誤差最主要的因素、文獻(xiàn)[5]重點(diǎn)研究了機(jī)床表面的輪廓誤差與幾何誤差之間的耦合關(guān)系并進(jìn)一步分析與研究了機(jī)床導(dǎo)軌的精度,雖然上述都考慮了幾何誤差的影響,但都忽略了熱引起的誤差因素。相關(guān)學(xué)者對熱誤差建模方法做了大量的研究,其中包括基于支持最小二乘向量機(jī)[6] 、模糊神經(jīng)網(wǎng)絡(luò)[7] 、灰色理論[8] 、回歸分析[9] 等,雖然這些誤差建模方法的預(yù)測精度較高,但在實(shí)踐操作過程中還存在建模方法較復(fù)雜且時(shí)間較長,模型魯棒性較低等一些缺點(diǎn)。
本文在一臺自主搭建的精密研拋數(shù)控機(jī)床上進(jìn)行試驗(yàn)與研究,綜合考慮了不同溫度狀態(tài)下機(jī)床定位誤差的變化規(guī)律與相互關(guān)系,根據(jù)幾何誤差與熱誤差的不同特點(diǎn)進(jìn)行誤差分離,基于牛頓插值算法和最小二乘法對機(jī)床分別建模,再綜合可得到幾何與熱的復(fù)合誤差數(shù)學(xué)模型,通過補(bǔ)償實(shí)驗(yàn)驗(yàn)證了該模型計(jì)算簡便,擬合精度高,易于程序設(shè)計(jì),為提高機(jī)床的加工精度提供了理論依據(jù)。
1.研拋機(jī)床復(fù)合元素建模原理與測量
1. 1 復(fù)合誤差建模原理
復(fù)合誤差是指與機(jī)床溫度和位置坐標(biāo)都相關(guān)的誤差元素。復(fù)合誤差建模過程比較復(fù)雜,先要進(jìn)行幾何誤差與熱誤差的分離(如圖1 所示),然后再對幾何誤差和熱誤差分別建模。采用位置K 的多項(xiàng)式擬合得到機(jī)床冷態(tài)下的幾何誤差模型,機(jī)床不同時(shí)間的熱誤差元素與機(jī)床溫度相關(guān),對不同時(shí)間的各熱誤差曲線進(jìn)行一次擬合得到相應(yīng)斜率,依據(jù)各時(shí)間段的溫度、斜率值構(gòu)造熱誤差模型,最后將以上兩種誤差模型合成為一個(gè)復(fù)合誤差模型。
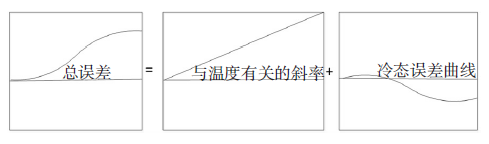
圖1 復(fù)合誤差分離圖
與機(jī)床溫度和位置坐標(biāo)都有關(guān)的復(fù)合誤差元素可表達(dá)為:
1. 2 復(fù)合誤差元素測量
為了測量機(jī)床y 軸不同時(shí)刻的定位誤差和溫度變化值,如圖2 所示,選用鉑電阻式Pt100 溫度傳感器和16 通道的XSR90 彩色無紙記入儀進(jìn)行溫度測量,根據(jù)相關(guān)性分析[11] ,溫度傳感器T1、T2、T3、T4 分別放在機(jī)床的y 軸平臺上,T1、T2 用來測量y 軸動導(dǎo)軌和直線電機(jī)動子的溫度,T3、T4 用來測量y 軸定導(dǎo)軌和直線電機(jī)定子的溫度,首先記入機(jī)床冷態(tài)時(shí)y 軸各測量部件的溫度值,然后每隔20、40、6090、120、及150min 記入其溫度變化值。
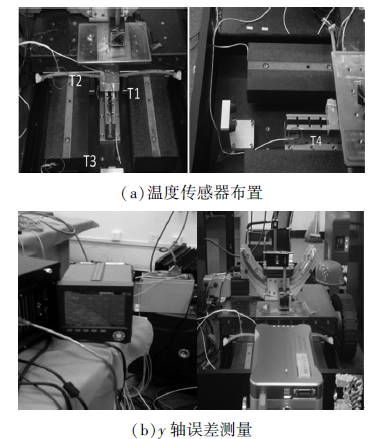
圖2 溫度與誤差測量現(xiàn)場
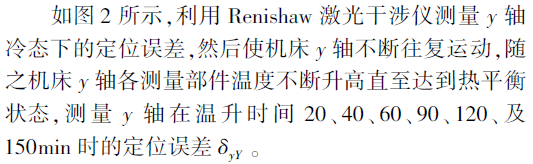
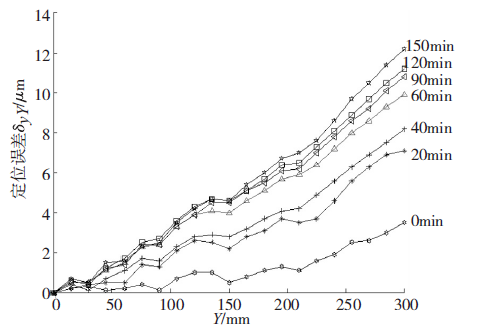
圖3 不同時(shí)段的定位誤差
圖3 為機(jī)床不同時(shí)刻的七條定位誤差曲線,從圖3 中可以看出,機(jī)床y 軸的定位誤差隨著機(jī)床溫度上升而增大,圖中七條定位誤差曲線形狀的變化規(guī)律基本一致,只是各條曲線的斜率隨機(jī)床y 軸溫度的升高而不斷變大,即機(jī)床在不同溫度下的定位誤差可以看成是機(jī)床冷態(tài)下定位誤差繞機(jī)床坐標(biāo)原點(diǎn)旋轉(zhuǎn)一定角度而來,這一規(guī)律為式(1)復(fù)合誤差建模提供了理論依據(jù)。
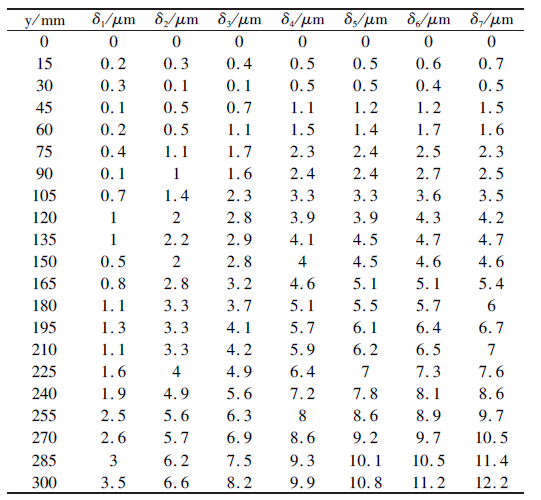
表1 所列δ1 、δ2 、δ3 、δ4 、δ5 、δ6 、δ7 為機(jī)床從冷態(tài)時(shí)至達(dá)到熱穩(wěn)態(tài)時(shí)7 個(gè)階段的定位誤差值,由表1 和圖3中看出前3 個(gè)時(shí)間段機(jī)床誤差上升較快,常溫下機(jī)床的最大定位誤差值與達(dá)到熱平衡狀態(tài)的最大定位誤差值相差大約為9μm,這說明研拋數(shù)控機(jī)床定位誤差受熱影響較大。
表1 定位誤差測量值
2.研拋機(jī)床復(fù)合元素建模
2. 1 幾何誤差建模
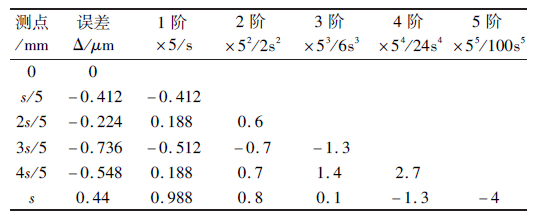
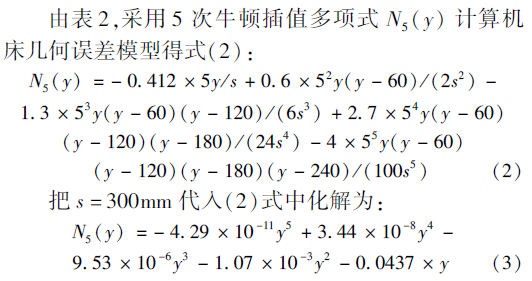
由復(fù)合誤差建模原理分析可知,熱引起的誤差與誤差曲線的斜率和機(jī)床坐標(biāo)位置有關(guān),所以幾何誤差和熱誤差建模的時(shí)候首先將機(jī)床冷態(tài)時(shí)的誤差曲線旋轉(zhuǎn)為水平位置(如圖4 所示),然后對旋轉(zhuǎn)后的誤差進(jìn)行幾何建模,本文對旋轉(zhuǎn)后的誤差采用牛頓插值法進(jìn)行幾何誤差建模,運(yùn)用激光干涉儀測量研拋機(jī)床定位誤差,y 軸行程為s = 300mm,測量間隔為15mm,每次測得21 個(gè)測量點(diǎn),應(yīng)用牛頓插值法,每隔4 個(gè)測量點(diǎn)選取定位誤差,選取冷態(tài)下(0min)6 個(gè)(機(jī)床原點(diǎn)誤差為0)誤差值Δ(旋轉(zhuǎn)后)與坐標(biāo)位置構(gòu)造5 階均差,均差表如表2 所示。
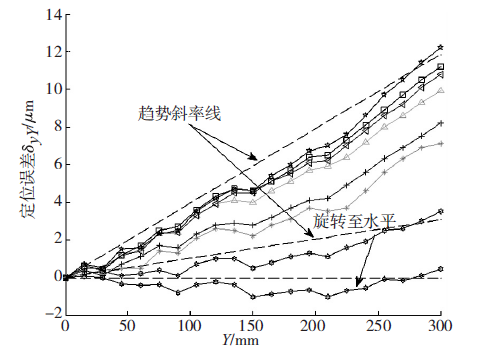
圖4 Y 軸誤差旋轉(zhuǎn)
表2 均差表
2. 2 熱誤差建模
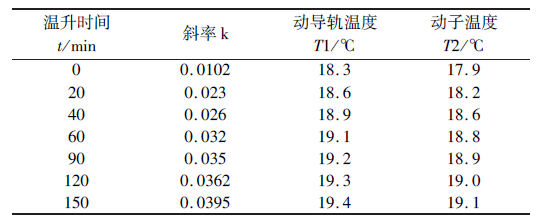
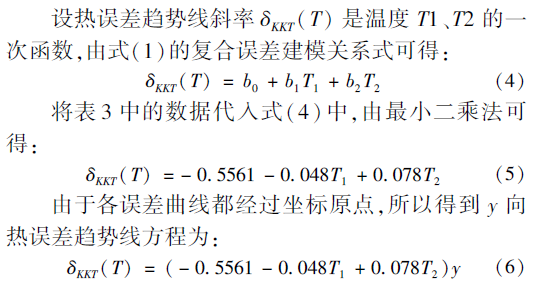
對圖4 所示的7 條誤差曲線進(jìn)行一次擬合,可以得到不同溫度下的趨勢線斜率。根據(jù)相關(guān)性分析,機(jī)床y 軸電機(jī)動子和動導(dǎo)軌溫度對y 軸誤差影響比較大,所以選取這兩個(gè)測溫點(diǎn)進(jìn)行y 軸熱誤差建模。機(jī)床不同時(shí)間下的溫度測量值與各條誤差曲線的趨勢線斜率值的對應(yīng)關(guān)系如表3 所示。
表3 溫度與斜率統(tǒng)計(jì)表
將旋轉(zhuǎn)后的幾何誤差模型式(3)以及熱誤差趨勢線模型式(6)代入到式(1)可得y 向幾何誤差與熱誤差的復(fù)合模型為:
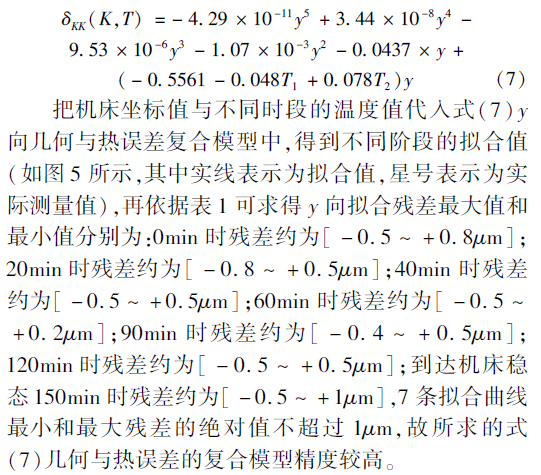
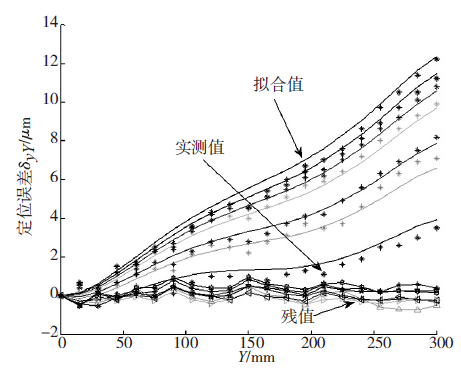
圖5 Y 軸誤差擬合
3.誤差補(bǔ)償實(shí)驗(yàn)
提高機(jī)床精度的方法有兩種[10] ,分別為誤差補(bǔ)償法和誤差防止法,誤差防止法是試圖通過提高機(jī)床本身的設(shè)計(jì)、制造和裝配等精度來盡可能的減少誤差來源,誤差補(bǔ)償法是人為地造出一種新的補(bǔ)償去抵消機(jī)床原始的誤差,誤差補(bǔ)償法相比誤差防止法費(fèi)用低、效率高,是提高數(shù)控機(jī)床加工精度的主要手段。
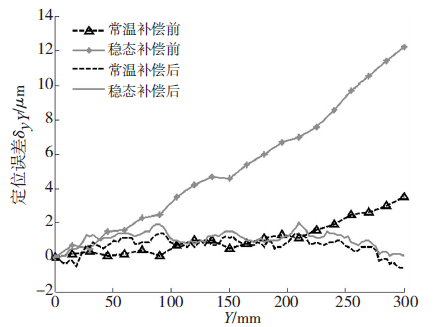
圖6 Y 軸誤差補(bǔ)償效果
本次試驗(yàn)采用誤差補(bǔ)償法, 借助精密研拋數(shù)控機(jī)床誤差補(bǔ)償控制器模塊, 依據(jù)式(7) 幾何誤差與熱誤差復(fù)合模型計(jì)算得到的機(jī)床冷態(tài)和穩(wěn)態(tài)時(shí)的補(bǔ)償量輸入到機(jī)床誤差補(bǔ)償表中進(jìn)行補(bǔ)償實(shí)驗(yàn),補(bǔ)償結(jié)果如圖6 所示,冷態(tài)時(shí)最大定位誤差從3. 5μm 降低到1. 2μm,誤差降低了65.7%,穩(wěn)態(tài)時(shí)最大定位誤差從12. 2μm 降到1. 9μm, 誤差降低了84.4%,補(bǔ)償效果十分顯著。
4.結(jié)論
(1)本文依據(jù)精密研拋數(shù)控機(jī)床y 軸溫升與其定位誤差變化關(guān)系的基礎(chǔ)上,提出了基于牛頓插值法與最小二乘法的幾何與熱復(fù)合誤差建模方法,該誤差模型計(jì)算量小,效率高,可以獲得較高的預(yù)測精度。
(2)根據(jù)幾何誤差與熱誤差的復(fù)合模型對機(jī)床進(jìn)行誤差補(bǔ)償實(shí)驗(yàn),實(shí)驗(yàn)表明該模型可以在不同溫度和工況條件下進(jìn)行誤差補(bǔ)償,補(bǔ)償效果顯著,有效提高了機(jī)床的加工精度。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別