



工業機器人在沖壓自動化生產線中的應用研究
2017-4-6 來源:清遠市技師學院 作者:曹智
摘要:在技術日新月異的年代,自動控制技術得到飛速發展,在工業領域逐漸得到廣泛應用,尤其在工業機器人出現后,能夠保證工業生產的安全順利進行,并將工業成本控制在最低范圍內,以其自身靈活性和便捷性受到社會的高度重視。本文主要探討了在沖壓生產線中利用工業機器人代替生產的自動控制系統,以更好地滿足工業生產與發展需求,僅供相關人員參考。
關鍵詞:工業機器人;沖壓自動化;生產線;應用
作為工業生產中的重要工藝生產線的沖壓自動化生產線,利用工業機器人可以提高生產效率,在一定程度上對工業生產成本進行優化控制,維護工業生產的綜合效益。工業機器人作為自動化設備中的執行機構,在沖壓自動化生產線上利用具有良好的應用價值,以下對該系統進行分析。
1.工業機器人概述
1.1 概念。
工業機器人是指在工業領域內所應用的機械手或機器人,其具有多關節和多自由度。在實際應用中,通過對工業機器人的運行程序進行預先設定,即可實現自動執行具體工作,并基于自身控制系統和動力系統實現預定功能,從而保證工業機器人的規范操作。可以通過現場對工業機器人控制或者通過預先編輯好程序來控制工業機器人,是其達到完成指定任務的目的。
1.2 結構類型。
工業機器人主要包含控制系統、機器人主體以及驅動系統等組成部分,其中機器人主體作為執行器件,其性能非常關鍵,它一般包含機座與執行機構。而要想機器人本體動起來還需有驅動系統,它由傳動機構和動力裝置組成。工業機器人的關節位的動作大多包含1~3個自由度,自由度總數可在3~6個左右。工業機器人作業過程中,基于技術人員在控制系統中編制程序實現對驅動系統及機器人主體發號施令,并控制機器人的執行動作,從而確保工業機器人的規范操作。1.3 特性分析。多數情況下我們可以通過將數控伺服軸,遙控操作器等進行有序連接,再利用預先設置好的程序驅動電路控制機器人本體,讓機器人動作有效地進行。一般應用于沖壓自動化生產線中的工業機器人具有行走功能,由于其內部具有模擬人類感知系統,在執行動作的過程中能夠基于此系統完成各項操作,在保證沖壓自動化生產質量與效率的同時,達到控制生產成本的目的。工業機器人具有較高的柔性,在控制程序修改上有一定可操作性,從而促進各項功能與動作的順利實現,更好地滿足沖壓自動化生產線的對工業機器人的應用需求。
2.機器人沖壓系統的設計
工業生產具有一定復雜性和危險性,工業機器人的應用,大多是代替人來從事危險系數較高以及重復率較高的動作,以促進工業生產的高效開展。其應用如圖1所示。工業機器人在沖壓生產環節中主要體現在5個方面:拆垛系統、涂油機、對中臺、壓力機兼上下料系統以及線尾輸送系統。
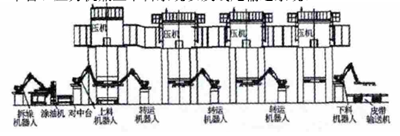
圖 1 機器人自動化生產線示意圖
2.1 系統的運行方式。
沖壓自動化生產的環節中,工業機器人需要有規范、合理的工作流程,精確到位的動作,才能確保工業機器人準確可靠的完成指定任務,這是安全生產、可靠生產的基礎。在生產過程中工業機器人的首要任務是垛料拆垛,之后進行板料對中操作,應用上料機器人進行放料相關操作,待沖壓后,利用下料機器人進行取料放料,再次沖壓后,結合生產中所需工序的數量循環進行,末端沖壓后,利用線尾機器人進行取料放料,并以人工方式進行碼垛處理。
2.2 系統組成。
根據沖壓工藝,系統主要包含拆垛系統、上下料系統、線尾輸送系統、對中臺、壓力機等組成。工業機器人能夠為拆垛系統的安全高效運行提供可靠保證。自動拆垛系統主要由走帶電機、拆垛小車、自動涂油裝置等組成,料臺為雙垛可循環式,確保生產連續進行,分料通過分張器將量分成單張,確保每次進料。在不同的位置條件下,走帶電機也處于不同狀態,板料通過導出式傳送帶傳到中臺,在導入式傳送帶的作用下,從拆垛機中取出物料放入涂油機中。在沖壓自動化生產線中,拆垛小車的作用是停放于上料后或上料區中,為后續機器人開展取料等操作提供極大的便利。當板料置于自動涂油機中時對板材表面進行涂油,保證涂油操作的規范性,從而提高板件抗腐蝕能力和潤滑程度。對中臺可方便的定位固件,這樣確保沖壓的正確性和可靠性。確保板件在沖壓自動化生產線中能夠得到良好應用。
2.3 控制系統。
控制系統作為系統的中心環節有著非常重要的作用,它的有效性和可靠性直接影響著工業機器人在沖壓過程中的實際應用效果,通過研究可知,在工業沖壓自動化生產線中,先進且可靠的控制系統能夠為工業機器人各項功能的發揮以及動作的準確執行提供可靠的保證。該沖壓自動化控制系統中的主要工作是實現上下料系統、線尾輸送系統以及中臺系統等的統一監管、調度和控制。為了能最大程度地發揮工業機器人的作用,在系統中我們設置有數據層和物理層,根據實際情況,通過調節軟硬件的參數設置。
2.3.1 數據層。
數據層的主要作用是完成數據的傳輸和處理,在系統中我們主要通過利用現場總線技術來實現個物理層或各設備之間的連線自控,而總線有多種,如Profibus總線EPA以太網總線等。為了提高系統運行的有效性和可靠性,數據層的數據傳送和處理非常關鍵,我們選擇用線少,方便,快捷,可靠的EPA技術。連接各EPA設備,配備Ethernet Card相關的網絡設備實現機器人控制系統接,監控網絡系統的對接,通過DCS控制系統實現集中管理分散控制的功能。這樣可以減少機器人因反復動作或其他原因而造成的數據層損壞錯誤等情況,達到系統安全、穩定、有效、可靠的運行的目的。
2.3.2 物理層。
物理層主要作用是采集數據和處理數據,是軟件系統運行的基礎,它的先進性和可靠性非常關鍵,它主要包括控制站、操作站、數據轉換接口、現場控制層、現場數據采集、執行機構等設備組成。現場設備通過現場總線和現場控制層連接。現場控制設備主要采用西門子PLC,數據采集和相應的EPA設備主要采用浙大中控設備為主。所選擇的物理層設備要有較強的開放能力,EPA通信,能夠將數據層的PLC開展數據交換,便于系統對各項設備數據有序采集,以確保控制系統能夠對工業機器人動作準確控制,提高各項動作執行的規范性。
2.3.3 人機交互平臺。
人機交互平臺作為直接操作的界面,他的整潔性、方便性、操作性、功能齊全性等非常重要。在計算機組成的中控操作站中,我們主要利用浙大中控提供的Configuratiom和Advan Trol Pro相關軟件進行。現場操作站可選擇西門子提供的觸摸屏。其操作面要具備給單元及功能模塊的檢測信息及錯誤報警,各環節操作流程和操作提示,各環節相關參數的顯示和操作,相關操作的互鎖功能及動畫界面等。在具有一定特殊性的基礎上,利用總線實現不同控制單元的有序連接,對診斷信息進行準確分析,并顯示出工業機器人的錯誤操作并進行預警,便于相關技術人員發現問題的第一時間進行妥善處理,以便在短時間內對故障問題進行妥善處理,從而保證控制系統的高效運行,提高沖壓自動化生產線的生產效率。
2.4 安全系統。
安全系統是自動控制系統自動生成,安全生產的命門,在物理層,我們需要利用安全柵等硬件來確保安全,在硬件的使用和軟件方面采取冗余結構,在它們的設置方面采用互鎖功能來保障安全。利用聲光報警燈方式及時提醒。在各關鍵環節如上下料,沖壓等環節設置好啟動和急停按鈕。利用這些手段做到提前預知故障,故障及時知曉,故障出現時做到自動恢復或安全處理停機處理,便于工作人員及時維修處理,為安全生產保駕護航。
2.5 仿真模擬系統。
仿真模擬系統是用于投運、教學演練、生產調試等。它的作用主要是在生產投運前做到有問題提前及時發現,不將問題帶入生產。在員工或學員培訓時能方便直觀地了解和操作系統,做到在最短的時間內熟練操作的目的。在生產調試過程中可以反復地模擬后再實踐,減少設備磨損和故障,縮短現場的調試時間。
3.結語
總而言之,隨著現代科學技術的不斷進步,技術方面和設備方面也越來越科學新穎,使得沖壓技術也得到優化,工業機器人的出現和應用,有效地代替了人工勞動,促進了工業生產效率的不斷提升,為工業產品質量控制打下良好的基礎。尤其是在沖壓自動化生產線中,工業機器人的應用促進了自動化生產水平的提升,并且將工業生產成本控制在最佳范圍內,在工業生產領域受到廣泛關注。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

