



交流伺服電機的PLC控制綜合性實驗開發與設計
2017-7-13 來源: 廣東石油化工學院 機電工程學院 作者:陳英俊,黃崇林
摘要:為探索機械類創新應用型人才的培養模式、提高學生的工程實踐能力,根據交流伺服電機的位置控制模式及PLC高速脈沖輸出原理,開發和設計了交流伺服電機的 PLC控制綜合性實驗.實驗內容包括設置交流伺服驅動器參數、電氣設計與連線、運用 PLC的高速脈沖處理指令編制程序,以及控制電機按指定的速度運行、單軸快速定位和指定的加減速動作.通過實驗,學生鞏固和擴展了課堂知識、激發了學習興趣、提高了教學質量.
關鍵詞:交流伺服電機;PLC控制;綜合性實驗
隨著交流伺服技術的發展,其技術越來越成熟,成本也不斷地在降低,交流伺服電機逐漸取代直流伺服電機成為機電一體化技術和產品中主流控制用電動機[1G2].特別是在多自由度的工業機器人、現代數控機床上,交流伺服電機因為其使用的便利性及免維護性,得到了廣泛的應用[3G4].交流伺服控制技術是高校機械類專業學生必須學習和實踐的重要內容[5G6],而可編程控制(programmablelogicalcontroller,PLC)是在工業控制中廣泛采用的一種穩定可靠的控制器,學生在高年級時已經修讀過相關課程,具備了開展交流伺服電機的PLC控制綜合性實驗的知識基礎.
本文根據探索機械類創新應用型人才培養模式的需要,以鞏固機械類學生相關的專業課程知識與提高其工程實踐能力、創新能力為目標,在交流伺服電動機系統和 PLC控制器組成的實驗平臺上,開展交流伺服電機的 PLC控制綜合性實驗技術研究,開發設計相應的實驗項目,對提高機械類專業學生的培養質量具有實際意義。
1.實驗設計原理
實驗開發與設計的目的,在于學生通過在本實驗中綜合運用交流伺服電機與PLC控制的知識,設計和搭建出PLC控制交流伺服電機的系統,學習和掌握交流伺服電機及其驅動器的操作和使用方法,實現交流伺服電機的單軸定位和加減速等的簡單控制,進一步強化學生對“機電一體化設計基礎”“可編程控制器”“機電傳動控制”等課程知識的掌握,提升學生的實際操作能力.同時教師利用此新的教學手段,提高教學質量和學生的學習效率.
1.1交流伺服電機及其驅動器的理論基礎
對于一般簡單的機電一體化控制系統,常常采用廉價的步進電機,其控制精度已經足夠;對于要求控制精度高,并且速度、負載變化大的場合,則應該采用交流伺服電機,又因其使用方便,所以常常取代了直流伺服電機[7].交流伺服電機必須與驅動器配套使用才能夠正常工作,伺服驅動器為伺服電動機提供動力及相應的控制信號,并且根據電動機尾部的光柵傳感器檢測到的電機速度或位置信號,實時調整電機動作,使其與設計人員既定的使用要求相匹配.交流伺服系統示意圖如圖1所示.
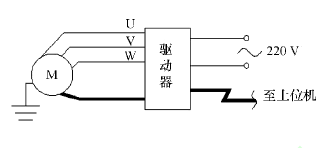
圖1 交流伺服系統示意圖
2.交流伺服電動機的驅動器
常見的3種控制模式有:位置控制、速度控制和轉矩控制[8].位置控制是通過上位機提供給伺服驅動器的脈沖控制信號來控制伺服電機動作的,而速度控制和轉矩控制則是通過上位機提供的模擬量控制信號去控制伺服電機的[9].本實驗選用的是80STGM02430交流伺服電機和AASD15A伺服驅動器,其技術規格如表1和表2所示.
表180STGM02430交流伺服電動機技術規格
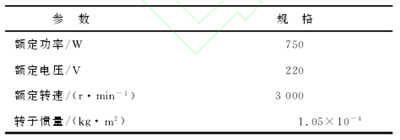
表2AASD15A交流伺服驅動器技術規格
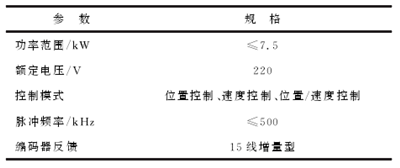
交流伺服電機額定電壓為常用的市電220V,功率在交流伺服電機中屬于小功率型,體積較小;驅動器則是與交流伺服電機同一生產廠家的、功率相匹配的驅動器.這里驅動器的控制模式選用位置控制,為一種常見的、易用的、成本較低的驅動器控制模式,一般都能夠滿足實際機電一體化系統的控制需要.選用的設備既能達到讓學生學會典型交流伺服系統的目的,而且使用方便、價格適中.
1.2PLC控制的交流伺服電機的理論基礎
實驗中的PLC控制器實質就相當于圖1中的交流伺服驅動系統的上位機,為交流伺服驅動器提供外部的控制信號.這里驅動器的控制模式選用位置控制,則 PLC則必須選擇能夠輸出脈沖控制信號的脈沖輸出型PLC,而非繼電器輸出型的 PLC.本實驗中直接利用PLC輸出的高速脈沖信號實現交流伺服系統的簡單控制.
本實驗選用的 PLC 型 號 為 FX1NG24MT,是日本三菱公司生產的功能強大的微型 PLC,能提供輸入輸出總點數為24點(輸入14點、輸出10),能同時輸出2點100k Hz脈沖,PLC配備有7條特殊的定位指令,包括零返回、絕對位置讀出、絕對或相對驅動以及特殊脈沖輸出控制[10].2 實驗開發與設計
2.1交流伺服驅動器的設置
在交流伺服電機及其驅動器連接PLC之前,必須通過其操控面板設定好驅動器參數,并且在修改后需寫入保存,重啟后方能生效.因此學生必須熟悉驅動器操控面板的操作.本實驗中必須設置的參數如表3所示.
表3交流伺服驅動器的參數設置
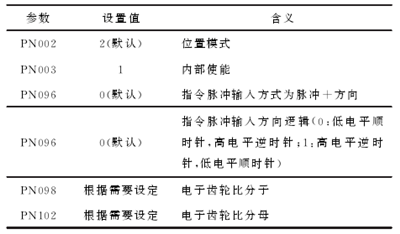
這里尤其需要注意的是電子齒輪比的設置.電子齒輪比是所有交流伺服驅動器必須設置的重要參數.因為交流伺服電機的編碼器反饋精度非常高,如這里采用的AASD15A伺服驅動器的編碼器為15線增量型,其理論每圈分辨率最高為215=32768個脈沖.但實際采用如此高的編碼器分辨率在編程和控制上并不方便,也往往不需要如此高的精度,所以一般都人工設定一個較低的分辨率,即每圈脈沖數.伺服驅動器的電子齒輪比定義為
PN098為電子齒輪比分子,出廠默認值為1,取值范圍為1~32767;PN102為電子齒輪比分母,出廠默認值為1,取值范圍為1~32767.比如欲設置交流伺服電機5000個脈沖轉1圈,則電子齒輪比為2,所以PN098應設為2,PN102應設為1;設置交流伺服電機10000個脈沖轉1圈,則電子齒輪比為1,所以 PN098應設為1,PN102應設為1,此為出廠默認值.熟悉并設置好電子齒輪比,在后續編程中才能對應地準確控制交流伺服電機的轉速和位移,從而保證實驗安全.
2.2PLC控制程序的編寫
學生需在計算機上自行安裝PLC編程軟件 (如GX Works2),并且正確設置 COM 通信口,通過編程電纜實現與PLC的通信,能夠順利讀取 PLC 中原來的程序.在 PLC控制交流伺服電機中,主要通過(D)PLSY和(D)PLSR 兩個高速脈沖處理指令實現電機指定速度運行、單軸快速定位和指定的加減速動作.(D)PLSY 指令用于產生指定數量的脈沖.通過在程序中使用(D)PLSY 指令可以控制交流伺服電機以恒定轉速轉動指定圈數,實現交流伺服電機的單軸快速定位.其指令格式如圖2所示[11].
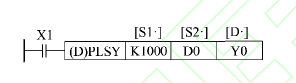
圖2脈沖輸出指令(D)PLSY
關于(D)PLSY 指令格式的說明:(1)圖2中指定脈沖頻率.對于 FX1N 系列PLC,用 16 位 指 令 PLSY 時,最 高 輸 出 頻 率 為32767Hz;用32位指令 DPLSY 時,最高輸出頻率為20k Hz.實驗中,交流伺服電機是位置控制也就是脈沖控制模式,是通過脈沖頻率控制電機的轉速,所以[S中的參數就決定了電機的轉 速.但電機實際轉速還需配合伺服驅動器中所設定的電子齒輪比進行計算,即電機每一圈所設定的對應的脈沖數,才能得出電機的實際轉速(r/min).
(2)圖2中指定脈沖數量.因為交流伺服電機為脈沖控制模式,所以中的參數就決定了電機的位移.類似于電機的實際位移也要通過伺服驅動器中所設定的電子齒輪比進行計算,才能得出電機實際轉過的圈數.
(3)圖2 中 。指 定 脈 沖 輸 出 元 件 號.對 于FX1N系列PLC,其輸出元件號只能為 Y0或者 Y1。
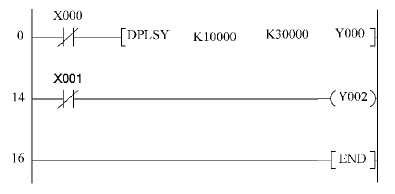
圖3含有(D)PLSY指令的程序示例
在圖3所示程序中,DPLSY 指令的的值為K10000,則表示輸出脈沖的頻率為10000Hz,若驅動器設定的電子齒輪比為2,交流伺服電機5000個脈沖轉一圈,每秒轉過10000/5000=2圈,則指定了電機的轉速為120r/min;的值為 K30000,電機共轉30000/5000=6圈;脈沖輸出元件為 Y0,方向信號輸出元件為Y2,為低電平,電機順時針轉動.(D)PLSR 是帶加減速功能的脈沖輸出指令.通過在程序中使用(D)PLSR 指令可以控制交流伺服電機以較平穩的速度啟動或者制動,可以用來減小對機械零部件的沖擊或者使得在轉速變化過程中容易采集相關數據[12].其指令格式如圖4所示[11].
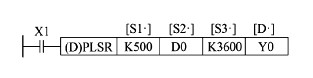
圖4 脈沖輸出指令(D)PLSR
(D)PLSR 指令按[指定的最高頻率分10級減速,達到指定的輸出脈沖數后分10級減速.關于(D)PLSR 指令格式的說明:(1)指定脈沖輸出元件,與(D)PLSY 指令類似,只能指定 Y0或者 Y1;(2)設定 對 應 電 機 的 最 高 轉 速 的 最 高 頻率,對于 FX1N 系列 PLC 最高可設為100k Hz,并且必須為10的倍數,實際電機轉速的計算與上述使用)PLSY 指令類似;(3)設 定 總 輸 出 脈 沖 數,使 用 16 位 指 令PLSR時,設 定 最 大 值 為 32767,使 用 32 位 指 令DPLSR時,設定最大值為2147483647;(4)設定加減速時間,單位為 ms,最大值為5000ms,并且還需滿足下列公式

2.3實驗電氣連線
實驗的電氣連線主要分為2部分.一部分是交流伺服電機與其驅動器連線,即完成如圖1所示的交流伺服電機系統連接.具體連接如下:伺服驅動器有3條電源線引腳,L1、L2、L3.對于小于1000 W的交流伺服電機,一般接單相220V,即接L1、L2即可.電機線 U、V、W、E 和驅動器的 U、V、W、地引腳一一對應連接.將廠家提供的電機編碼器線與驅動器CN3直接相連.這部分的連線一般是連接好后,以后無論采用何種上位機對交流伺服電機進行控制,都不需要改變的.實驗的電氣連線另外一部分是伺服驅動器余下的CN2與上位機PLC的 連接.CN2為交流伺服系統的控制信號輸入接口.CN2接口一共包含25個引腳,采用位置控制模式的話只用到其中少數幾個引腳.PLC 輸出的是24V 脈沖信號,按照伺服驅動器說明書,如圖 5 所示連接至PLC.其中的方向信號引腳,按照默認邏輯如果接到24V高電平的信號或者懸空,則電機逆時針轉動,若接到低電平信號0V,則電機順時針轉動.
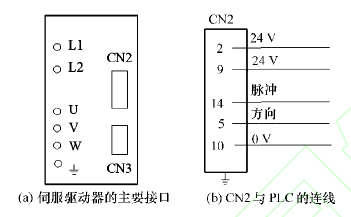
圖5驅動器接口與 PLC連線
2.4實驗結果與注意事項
實驗中,通過編制含有(D)PLSY 和(D)PLSR 兩個指令的程序,均能使得交流伺服電機動作,并且根據程序中設定的參數及驅動器設定的電子齒輪比計算得到的轉速,與驅動器操控面板上顯示的轉速一致.根據程序中設定脈沖數與電機轉過的圈數一致,加減速時間也一致.用(D)PLSR 指令實現了交流伺服電機如圖6所示的梯形加減速控制.實驗結果與預期控制結果一致.
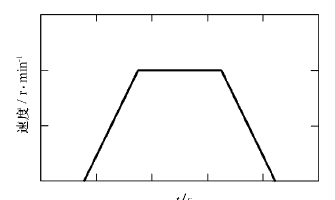
圖6 梯形加減速曲線
實驗中必須注意的是所用 (D)PLSY 和 (D)PLSR指令對某個輸入元件都只能使用一次;PLC 的輸出端子需要完整的回路,才能有電流流通或對控制元器件施加電壓,所以使用到的輸出元件的 COM 口需要短接.另外還需注意實驗的組織形式:(1)實驗分小組進行,小組人數以4人左右為宜,小組內分工須嚴格明確.
(2)為提高學生的創新實踐能力,實驗中所有連線都須學生親手連接,指導教師不給定參考程序,由學生自己靈活自由編制程序.實驗過程中,指導教師主要是對連線結果進行把關,保證實驗安全,以及指定學生必須要實現的電機動作.
3.結語
通過開發交流伺服電機的PLC控制綜合性實驗,讓學生設計并且實現了由PLC和交流伺服電機及其驅動器組成的機電控制系統,使學生熟悉了交流伺服電機的控制方法,掌握了 PLC控制交流伺服電機程序的編寫及相關軟件.自己動手連線、操作驅動器等使學生也學到了一些教科書上沒有的知識,激發了學生對PLC控制設計的興趣,為其將來從事相關機電一體化系統設計工作奠定了基礎.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

