


摘要:介紹采用開環控制數控銑床伺服電機抱閘的電氣控制工作原理,分析銑床在開機或在加工過程遇急停時主軸箱突然下滑的故障原因,提出對抱閘控制的電氣線路進行改進。改進后的電路符合電氣控制要求,保護了人身和設備安全,節省了制造廠要求更換數控系統的昂貴費用。
關鍵詞:數控銑床;主軸箱(Z軸);突然下滑;抱閘控制;電氣線路;改進
0 引言
筆者公司購進的兩臺數控銑床,數控系統型號為GSK990M,伺服驅動系統型號為DA98-14。使用大約兩年后,發現機床在開機或加工過程中遇急停狀態時,主軸箱(Z 軸) 出現瞬間向下滑行約15 cm的現象,給人身和設備產生嚴重的安全隱患。筆者試圖通過以下三種方法來維修:
(1) 懷疑Z 軸電機抱閘磨損引起摩擦力變小,更換電機;(2) 增加平衡塊的重量;(3) 調整Z 軸導軌與鑲條的間隙,結果都未能解決Z 軸下滑問題。最后通過對電氣控制線路的認真分析,提出抱閘的電氣控制電路的改進,解決了主軸箱突然下滑問題,消除了安全隱患,節省了制造廠提出更換數控系統的昂貴費用。
1、機床抱閘電氣控制原理和故障分析
1.1機床抱閘的電氣控制原理
機床使用GSK990M開環控制數控系統,Z 軸伺服電機帶抱閘制動裝置,抱閘的工作電源為DC24V,通過外部接觸器、繼電器控制而不是數控系統內部控制,抱閘得電打開,失電抱緊。Z軸上的主軸箱通過鏈條與床身后的重量平衡裝置相連且主軸箱與平衡塊重量相當,抱閘信號是重力軸控制下滑的有效手段,通常將伺服系統準備好信號作為抱閘打開的一個必要條件。理論上,只要抱閘信號與伺服電機驅動使能信號的時序符合控制要求,在開機、加工過程突然斷電或遇緊急停止情況時,即使抱閘信號由于負載動作的延時也不會大幅度地下滑 。
1.2機床的故障分析
數控銑床經過兩年的使用,在機械裝置方面,抱閘制動器、鏈輪、絲桿、導軌等由于機械磨損引起摩擦力變小,會產生主軸箱與平衡塊出現不平衡狀態,同時產生主軸箱下滑的原因還有控制伺服電機抱閘裝置的線路設計不合理、系統參數設置不合理、電機選型不當(制動器額定力矩偏小) 等引起。本文所提及的數控銑床是由于機床電氣線路設計不合理引起機床在開機或加工過程中遇急停狀態時,主軸箱(Z 軸) 出現瞬間向下滑行。從機床的控制線路可以看出,機床在開機時,抱閘得電即時打開,而伺服驅動器從得電到伺服電機激勵需要一定的延時,這樣出現了抱閘得電時間超前伺服電機激勵的時間,引起主軸箱因重力下滑;當機床遇急停狀態時,抱閘處于得電打開狀態,伺服電機無勵磁,同樣引起主軸箱因重力慣性下滑。
2、電路的改進和故障的解決
2.1 機床在開機時,主軸箱(Z軸) 出現瞬間向下滑行故障的解決方法
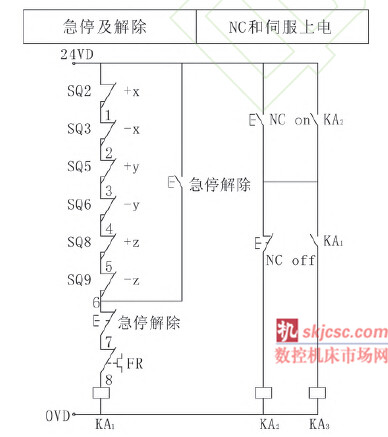
圖1 NC和伺服上電
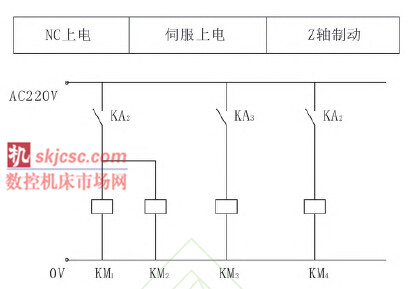
圖2 伺服上電和Z軸制動電路
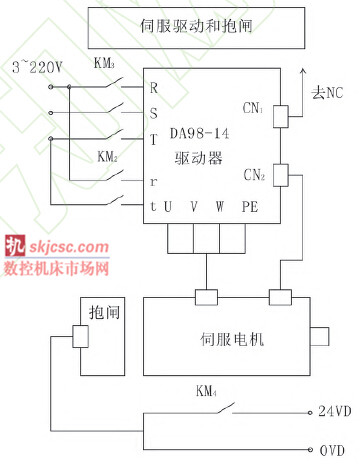
圖3 伺服驅動和抱閘控制
電路改進前機床的開機過程,相關電路見圖1~圖3[2] 。工作過程:機床上電→繼電器KA線圈得電(無急停、超程和電機過載狀態時) →啟動NC→繼電器KA2線圈得電自鎖→繼電器KA3線圈得電→接觸器KM1、KM2、KM3、KM4線圈得電(接觸器KM2、KM3分別控制伺服驅動器的控制電源和驅動電源) →Z 軸電機抱閘因KM4得電打開,伺服驅動器因接觸器KM3得電使伺服電機激勵,產生力矩防止主軸箱下滑。但是由于時序不同步,電機抱閘(外控) 得電打開時間超前伺服電機產生激勵時間(大約1秒),造成主軸箱瞬間向下滑行。
電路改進的原理:調整電機抱閘得電與電機激勵的時序,使抱閘得電打開時間滯后電機得電2秒,抱閘得電打開延時2秒并不影響機床的正常工作。改進電路見圖4和圖5,用時間繼電器KT1(型號:WENJI-3) 代替接觸器KM4,設置延時2秒。開機過程,NC啟動→繼電器KA2線圈得電自鎖→繼電器KA3線圈得電→接觸器KM1、KM2、KM3、時間繼電器KT1線圈得電→Z 軸電機抱閘因 KT1動合觸點延時2秒得電打開,伺服驅動器因接觸器KM3得電使伺服電機激勵,產生力矩防止主軸箱下滑。
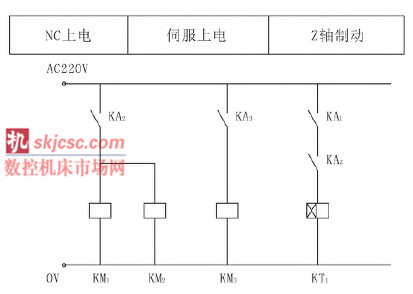
圖4 改進后伺服上電和Z軸制動
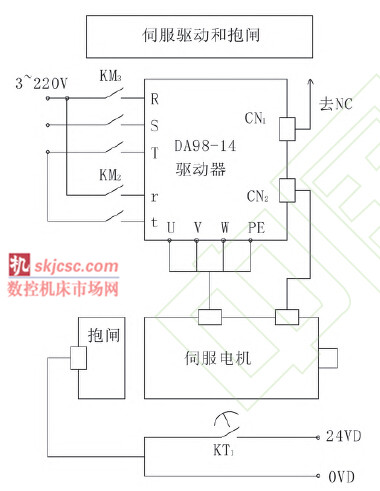
圖5 改進后伺服驅動和抱閘控制
2.2機床在加工過程中遇急停狀態時,主軸箱出現瞬間向下滑行故障的解決方法
電路改進前機床遇急停狀態的開機過程,見圖1 NC和伺服上電電路,圖2[1]伺服上電和Z軸制動電路,和圖3 [1]伺服驅動和抱閘控制電路。工作過程:當機床遇急停或碰到限位開關時,繼電器KA1線圈失電→繼電器KA3線圈失電→接觸器KM3線圈失電→伺服驅動器失電,伺服電機無激勵,失去牽引力。與此同時,因機床在急停時繼電器KA2仍得電即NC仍處于啟動狀態→接觸器KM1、KM2、KM4 線圈(以下改為時間繼電器KT1線圈) 仍保持得電→電機抱閘仍處于打開狀態,所以加工過程中機床遇急停或碰到限位開關時,電機抱閘處于打開狀態,電機又無勵磁失去牽引力,主軸箱因重力慣性會產生瞬間向下滑行現象。
電路改進的原理:在控制時間繼電器KT1線圈(原接觸器KM4) 的線路中串聯繼電器KA1的動合觸點,見改進后的圖4和圖5。工作過程:當機床遇急停或碰到限位開關時,繼電器KA1線圈失電→繼電器KA3線圈失電→接觸器KM3線圈和時間繼電器KT1線圈失電→接觸器KM3線圈失電引起伺服驅動器失電,伺服電機無勵磁失去牽引力,時間繼電器KT1 線圈失電引起電機抱閘抱緊,防止主軸箱因重力慣性產生瞬間向下滑行。
3、結語
采用開環控制的數控銑床,由于機床電氣線路設計不合理產生主軸箱(Z 軸) 在開機和加工過程遇急停時突然下滑的故障,作者對控制抱閘的電氣線路進行改進,有效地解決主軸箱的突然下滑問題,解除了安全隱患,為公司節省了設備廠要求更換控制系統的高昂費用。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

