


機床滾轉角高精度測量中的頻偏現象研究
2016-11-21 來源: 西安交通大學機械工程學院 作者:余寶,王昭,黃軍輝,齊靜雅,李朝暉,郭俊
摘要:為降低正交偏振先外差干涉相位法中相位差的波動幅度,提高滾轉角的測量精度,利用瓊斯矩陣法,建立了測量光路和參考光路數學模型。新模型在原有模型的基礎上考慮了雙頻激光器頻差的不穩定性和光電探測器響應時間的差異性的影響,推導出測量信號和參考信號之間的頻率偏差(簡稱頻偏)會對相位差波動產生較大的影響。在此基礎上,給出頻偏是由雙頻激光器頻差的不穩定性和光電探測器響應時間的差異性綜合作用產生的,并且量化了頻偏對于滾轉角測量精度的影響。根據該模型,提出通過提高雙頻激光器的穩頻精度和降低光電探測器的響應時間的差異性的方法來降低頻偏,進而降低相位差波動。實驗結果表明:在降低光電探測器響應時間的差異性后,相位差實際波動幅度由0.7。下降到O.1。左右,測量誤差降低了85.7%,證明了分析模型有效可行。
關鍵詞:相位差;滾轉角;頻偏;精度
基于直角坐標系統的機床或測量機共有21項結構誤差,其中滾轉角誤差參數測量較困難。目前,國內外針對滾轉角的測量做了大量的研究,其中基于拍頻信號相位檢測的外差干涉法以其非接觸、高靈敏度、光路簡單等優點有著良好的應用前景。前蘇聯Coronkevich等最先提出利用縱向塞曼激光器實現滾轉角的測量[1]。清華大學蔣弘等提出基于橫向塞曼激光器的非線性滾轉角測量方法,使用1//4波片將正交的線偏振光橢偏化,極大地增加了滾轉角測量的靈敏度[2]。在此基礎上,柳忠堯等提出改進方案,用1/2波片替代偏振片作為敏感元件,并通過角錐棱鏡折返兩次通過1/2波片,靈敏度是改進前的4倍[3]。這類方案都是通過檢測拍頻的相位差,進而推算出滾轉角的大小,因此相位差值的準確及穩定與否將直接決定滾轉角的測量精度和不確定度。本文基于文獻[3—4]的方案,論述了測量基本原理,并建立了頻偏產生的數學模型,仿真和實驗分析了頻偏對于相位波動的影響,最后給出了減小和消除頻偏的方法。
1.滾轉角測量
1.1 測量原理
基于相位的激光外差滾轉角測量系統如圖1所示。塞曼雙頻激光器發出正交線偏振光,經分光棱鏡,其中反射光經過檢偏器被光電探測器接收作為參考信號;透射光分別經過1/4波片、1/2波片,經過直角棱鏡反射后,再次經過1//2波片,最后經過檢偏器被光電探測器接收作為測量信號。1//2波片作為角測量傳感器隨被測物體運動,當存在滾轉誤差時,1/2波片隨之轉動,進而引起測量信號和參考信號之間的相位差發生變化,因此可以根據相位差變化量進而求出滾轉誤差的大小。本研究使用成都工具研究所研制的MJS5200型He—Ne縱向塞曼激光器,通過在內部安裝1/4波片,從而使其出射正交線偏振光。
1.2 數學建模
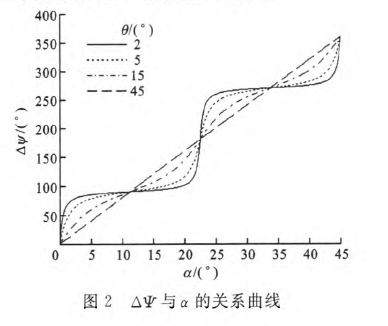
建立如圖1所示的坐標系,以1/4波片快軸為z軸,慢軸為Y軸,正交線偏振光與z軸的夾角為0,1/2波片快軸與z軸夾角為口,調節檢偏器偏振方向
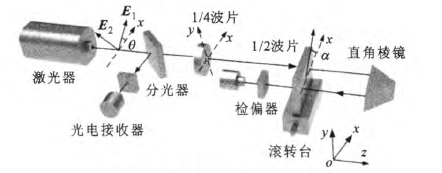
圖1測量原理光路圖
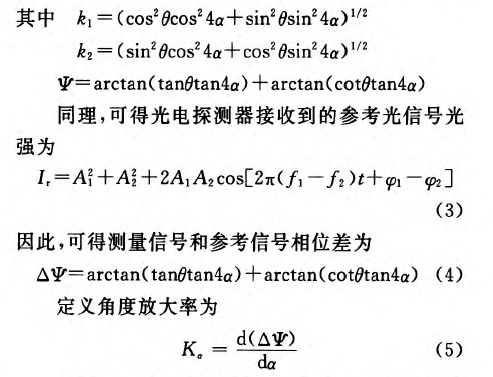
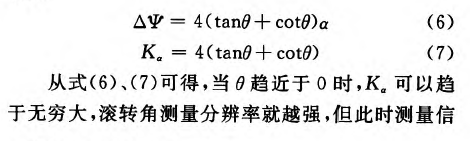
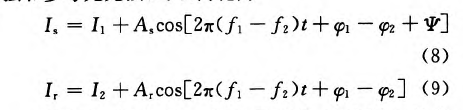
與z軸重合,則可得光電探測器接收的測量光信號為
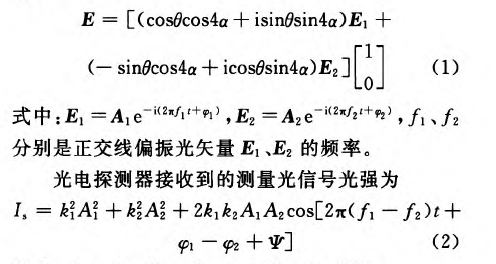
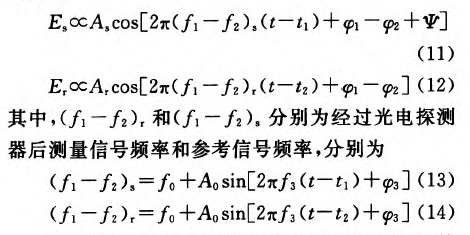
2.頻偏引起相位誤差分析
頻偏即頻率偏差,指測量信號和參考信號頻率不相等,有偏差。在一般測量中,小的頻偏的影響可以忽略不計,但是在高精度滾轉角測量系統中,這種小的頻偏會造成相位值的波動[7],從而對滾轉角測量精度造成非常大的影響。本節分析了頻偏產生的原因,以及用MATLAB仿真分析了其會產生滾轉角測量誤差,最后用實驗數據證明了分析的正確性。
2.1頻偏的產生
式(2)、(3)分別是光電探測器接收的測量光光強和參考光光強,可以簡化為
理論上,頻差f1-f2是不變的,但實際上是變化的。實驗室所用He-Ne雙頻激光器頻差在1 min內的變化如圖3所示,由圖可得,頻差的大小隨時間周期性變化,變化趨勢近似正弦,因此頻差可以近似描述為
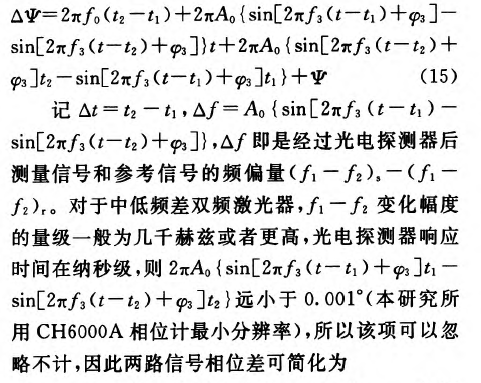
另外,測量信號和參考信號在經過光電探測器之前是同步的,但由于光電探測器響應時間不同,兩路信號經過光電探測器光電轉換之后出現延遲,導致兩路信號的頻率出現小的偏差,即頻偏。設兩光電探測器的響應時間分別為t。和tz,則經過光電探
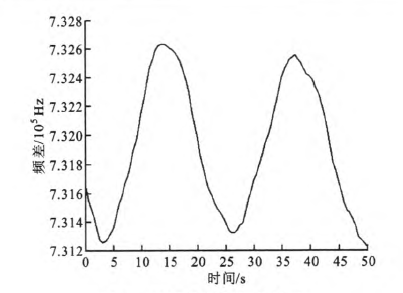
圖3雙頻激光器頻差波動
測器濾去直流分量后,得到的測量信號和參考信號分別為
將式(13)、(14)分別代人式(11)、(12)中,計算測量信號和參考信號的相位差,化簡得
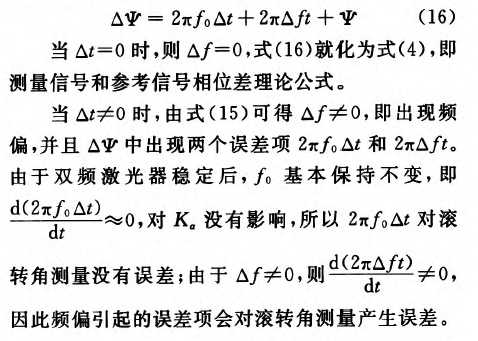
2.2 頻偏引起的誤差
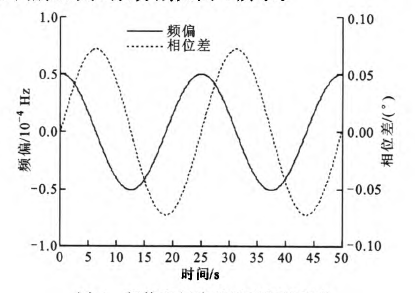
圖4頻偏和相位差隨時間的變化
2.3 實驗分析
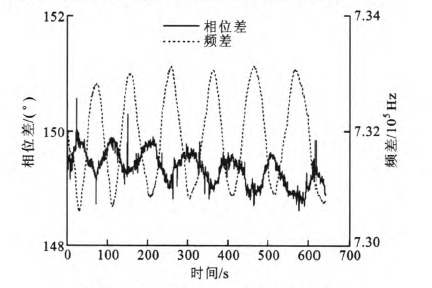
圖5相位差和頻差隨時間的變化
由圖5可得,相位隨頻差同周期變化,且近似為正弦或者余弦變化,與數學模型仿真分析結果基本相符。不考慮突變的數據點時,相位差在一個周期內的平均變化量為0.7。,是仿真分析的4.87倍。這是由仿真分析的參數與實際參數的差異造成的,因為光電探測器由光電二極管及其后續放大電路等組成,較為復雜,并沒有其響應時間的準確數值,200ns只是一個估計值而已,與實際響應時間存在較大的偏差,因此實際相位變化與仿真分析結果有一定偏差是可以接受的。總體來說,實際實驗結果與理論分析結果基本相符。
3.頻偏的減小與消除
3.1 消除原理
由式(18)可得,頻偏是由雙頻激光器頻差的不穩定性和光電探測器的響應時間的不一致性共同作用導致的,因此可以通過提高雙頻激光器的穩頻精度,即減小頻差變化幅值A。和變化頻率^,以及提高光電探測器的一致性,即減小兩光電探測器的響應時間差扯來減小頻偏。
頻偏對相位差的影響見式(19),可得.廠3對相位差的波動幅度不產生影響,進而就不會對滾轉角測量精度產生影響,因此在選擇雙頻激光器時就可以放寬對^的要求。
3.2 實驗驗證
實驗室原先使用的光電探測器由成都工具研究所提供,10 rain內相位差的波動情況如圖5所示,平均每個周期的相位波動量為0.7。。將光電探測器更換為出更小的成都工具研究所的同一型號產品,則10 min內的相位差波動情況如圖6所示。
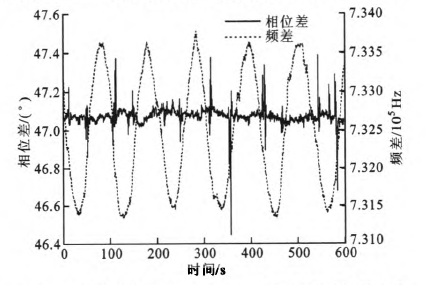
圖6更換光電探測器后相位差和頻差隨時間的變化
由圖6可得,更換&更小的光電探測器后,不考慮突變的數據點時,相位差在一個周期內的平均波動量為0.10左右,低于之前0.7。的波動量,效果明顯改善,從而驗證了通過減小兩光電探測器的響應時間差來降低頻偏和相位差波動幅度的方法的可行性。
4.結論
本文主要從理論上分析了基于相位的激光外差滾轉角測量系統頻偏產生的原因,以及頻偏對于滾轉角測量造成的誤差影響,并進行了實驗驗證,結果表明微小的頻偏會造成相位值的波動,進而對滾轉角測量精度造成非常大的影響。針對該問題,文中提出通過提高雙頻激光器的穩頻精度和減小光電探測器的響應時間差的方法來減小和消除頻偏,降低相位差的變化幅度,進而提高滾轉角測量精度,并通過實驗證明了方法有效可行。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

