


摘要:插床中插刀的上下往復運動直接關系到工件切削的效率.建立插床六桿機構的矢量模型,用M atlab /Sim ulink 中的積分模塊建立仿真框圖,設置合理的初始條件,將插刀的位移、速度和加速度曲線規律可視化.對機構作計及摩擦力的靜力分析,通過摩擦圓和相對角速度判斷運動副所受摩擦總反力的方向,依次求解各個構件的靜力平衡方程式,得出主動件上所能克服的等效阻力矩,并用M atlab 軟件得出等效阻力矩隨時間變化的規律。
關鍵詞:插床六桿機構;運動學;積分模塊法;靜力學;摩擦圓
插床是一種應用廣泛的普通機床,利用插刀的上下往復運動完成對鍵槽和型孔的插削工作,尤其適用于加工不通孔或有障礙臺肩的內孔鍵槽.插床中的六桿機構是以雙曲柄機構為基礎擴展而成的,可以實現預期的運動規律并與插刀相連,實現切削主運動.文獻[1 −7]介紹了用PR O /E 和M atlab 工具箱中的Sim ulink 構建曲柄導桿機構、曲柄搖桿機構和曲柄滑塊機構等平面機構的仿真模型,或進行運動規律分析,或進行動力學分析,但鮮有文獻對機構作計及摩擦力的靜力學分析,而靜力分析對計算機構各零件的強度、確定機械效率及機械工作時能克服的阻力矩等因素具有非常重要的作用。
本研究抽象出插床六桿機構的矢量模型,建立數學模型,使用M atlab /Sim ulink 中的積分模塊對插刀進行運動仿真,將插刀的位移、速度和加速度曲線可視化,以便直觀地表達插刀的運動規律.計及摩擦力的機構靜力分析,借助摩擦圓和相對角速度的轉向獲得各構件的摩擦總反力方向,求解各構件的靜力平衡方程,在工作阻力已知的情況下確定主動件上的平衡力矩隨時間變化的規律.
1、插床六桿機構的矢量模型
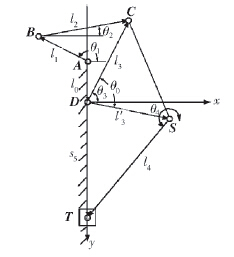
圖1 插床六桿機構
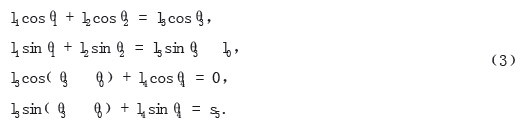
插床六桿機構如圖1 所示,AB C D 為雙曲柄機構,主動件AB 和從動件C D 作整周運動,B C 為連桿,AD T 為機架,D ST 為曲柄滑塊機構,滑塊T 為插床的插刀.對機構中的各個構件用帶箭頭的直線表示為位移矢量,位移矢量的大小即構件的長度,矢量與x 軸正向所夾的角即為構件的夾角﹙逆時針為正﹚.將雙曲柄機構AB C D 和曲柄滑塊機構D ST 看成封閉矢量多邊形,由復數矢量法可知A B + B C = A D + D C , ﹙1﹚D S + ST = D T . ﹙2﹚將式﹙1﹚和式﹙2﹚中各矢量分別向x 軸和y 軸投影,得到投影方程為
2、用積分模塊法建立仿真模型
分別對式﹙3﹚的4 個方程求導,得到速度方程組:
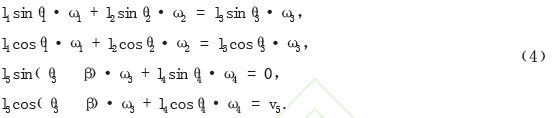
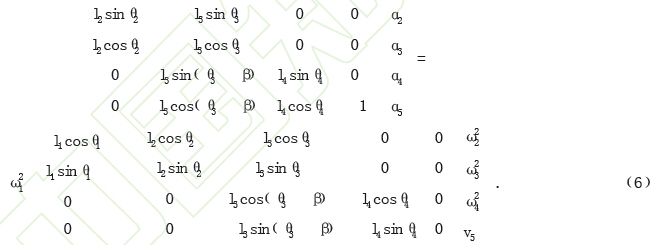
將方程組﹙4﹚寫成矩陣形式:

對式﹙5﹚求導,得到加速度方程組的矩陣表達式:
對插床六桿機構進行仿真分析時,初始條件必須滿足相容性,設主動曲柄的初始位置為0 rad,角速度為1 rad /s,其他構件的位移和速度初始值可根據公式﹙4﹚和﹙5﹚求得,見表1.
表1 仿真的初始條件
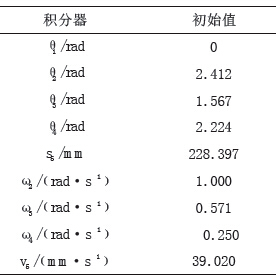
設六桿機構中l1 = 90 m m ,l2 = 120 m m ,l3 = 140 m m ,l4 = 200 m m ,l0 = 60 m m ,主動曲柄的初始位置θ1= 0 rad,角速度ω1 = 1 rad /s﹙6.28 s 為1 個周期﹚,仿真時間為10 s。
求解加速度方程需要編寫M atlab 函數m yfun _ sixbar,該函數的輸入參數為各個構件的位移和速度,輸出參數為各個構件的加速度.利用Sim ulink 積分模塊,通過加速度計算速度和位移,過程如圖2 所示。
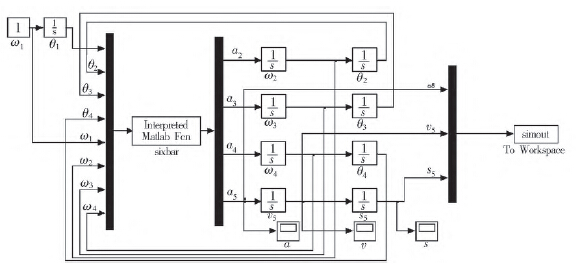
圖2 積分模塊法表示的插床六桿機構的仿真模型
為了觀察插刀的位移、速度和加速度運動規律,在模型的相關位置分別安裝示波器,以實現計算結果的可視化,見圖3 至圖5。
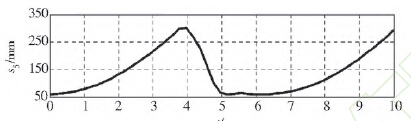
圖3 插床六桿機構中插刀的位移曲線
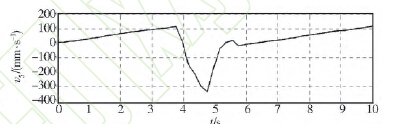
圖4 插床六桿機構中插刀的速度曲線
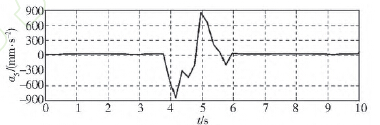
圖5 插床六桿機構中插刀的加速度曲線
從圖3 可知,插刀一個周期的用時約6.2 s,行程約260 m m ,工作行程用時約3.9 s,而返回行程用時僅約2.3 s,這說明插床六桿機構具有急回運動.從圖4 和圖5 可知,插刀的工作行程近似符合等加速度運動規律,而在返回行程的初始階段,速度顯著增大,隨后又急劇變小,致使加速度有較大的峰值,說明此時構件受到了較大的慣性沖擊力,為類似的機構優化設計提供了改進的方向.
3、計及摩擦力時的機構靜力分析
插刀5 上作用有工作阻力F ,假設最大工作阻力F = 1 000 N ,摩擦系數為f = 0.1 ,則摩擦角Φ=arctan f.各鉸鏈的銷釘半徑r = 10 m m ,當量摩擦系數為fv 時,摩擦圓半徑ρ= fvr .F ij表示第j個構件受到第i個構件的摩擦總反力,方向與摩擦圓相切,指向與相對角速度的轉向相反,如圖6 所示.插刀5 受到了三力作用,如圖6 ﹙a﹚所示,三力匯交于一點,F 是已知的工作阻力,由力的三角形可得
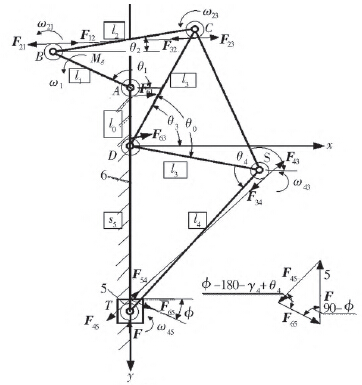
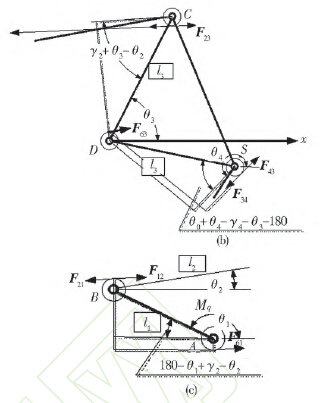
圖6 考慮摩擦時機構的受力分析
編寫M atlab 程序m yfun_m q,以θ1,θ2,θ3,θ4為輸入參數,M q 為輸出參數,將m yfun_m q 嵌入仿真模型中通過示波器將M q 的變化規律可視化,如圖7 所示.
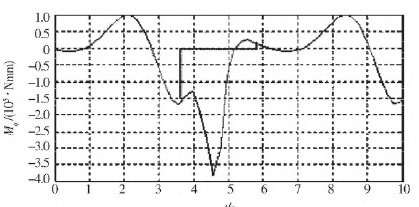
圖7 主動件上等效阻力矩隨時間變化的曲線
主動件上的等效阻力矩以6.28 s 為周期變化,由于返回行程時F = 0,故應將橫坐標3.7 ~5.8 s 的等效阻力矩設定為0 N m m ,從而等效阻力矩的最大值為1.7 ×105 N m m ,并且出現在工作行程即將結束時.
4、結語
本研究用M atlab /Sim ulink 中的積分模塊實現了插床六桿機構中插刀的位移、速度與加速度運動規律的可視化.提出了計及摩擦力的機構靜力學分析,借助摩擦圓和相對角速度的轉向得到了各構件運動副上摩擦總反力的方向,通過靜力平衡方程求得摩擦總反力的大小,并獲得了主動件上所能克服的等效阻力矩隨時間變化的規律。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

