控")



基于嵌入式PLC的數(shù)控機(jī)床自動控制系統(tǒng)
2020-11-2 來源:陜西機(jī)電職業(yè)技術(shù)學(xué)院 智能制造學(xué)院 作者:孫釗
摘 要:隨著科技不斷進(jìn)步,PLC控制器在數(shù)控機(jī)床得到了廣泛地應(yīng)用。以控制器框架結(jié)構(gòu)為基礎(chǔ),研究數(shù)控機(jī)床的自動控制系統(tǒng),計(jì)算并比較系統(tǒng)內(nèi)重要的運(yùn)行參數(shù),并結(jié)合硬件結(jié)構(gòu)的不同屬性,對嵌入式 PLC系統(tǒng)方案進(jìn)行分類。研究結(jié)果顯示,PLC自動化控制系統(tǒng)具有較高的抗干擾能力,可提高系統(tǒng)運(yùn)行的準(zhǔn)確性和穩(wěn)定性;滾動軸的導(dǎo)程由電機(jī)運(yùn)轉(zhuǎn)速度和移動桿的轉(zhuǎn)動速度決定,當(dāng)電機(jī)運(yùn)轉(zhuǎn)速度越高時(shí),導(dǎo)程的數(shù)值越小,反之則越大。研究結(jié)果為數(shù)控機(jī)床自動控制系統(tǒng)性能提升提供了科學(xué)依據(jù)。
關(guān)鍵詞:PLC;數(shù)控機(jī)床;自動化;控制系統(tǒng)
0、引言
現(xiàn)在工業(yè)的自動化、集成化以及柔性化是提高勞動生產(chǎn)率、提升產(chǎn)品質(zhì)量的基礎(chǔ)。而隨著科技的不斷進(jìn)步,使 得 數(shù)控機(jī)床的 控 制 電 路 由 傳 統(tǒng) 的 繼 電 器 邏 輯 電 路 RLC(RelayLogic Circuit-RLC)逐 步 升 級 為 可 編 程 邏 輯 的 控 制 器 PLC(Programmable Logic Controller-PLC),其 PLC 控制系統(tǒng)的發(fā)展是以傳統(tǒng)的繼電器、接觸器控制為基礎(chǔ),采用特殊的存儲介質(zhì),為特殊的用途而設(shè)計(jì)出來,主要實(shí)現(xiàn)內(nèi)部介質(zhì)存儲、運(yùn)算過程分析、程序結(jié)構(gòu)控制等功能,控制各種類型的機(jī)械或生產(chǎn)過程,其在數(shù)控機(jī)床中常以內(nèi)裝式和獨(dú)立式兩種形式存在。在機(jī)械 行 業(yè) 的 應(yīng) 用 過 程 中,可 以 大 大 的 節(jié) 省 人 力 勞動,提高工業(yè)生產(chǎn)效率,因其邏輯編程操作簡易,具有較高的抗干擾能力,提高了系統(tǒng)運(yùn)行的準(zhǔn)確性和穩(wěn)定性。本文就針對于在 PLC的基礎(chǔ)之上研究數(shù)控機(jī)床的自動控制系統(tǒng)的設(shè)計(jì)。可編程邏輯控制器是一種以微處理器為基礎(chǔ)的數(shù)字運(yùn)算電子系統(tǒng),該系統(tǒng)在數(shù)控機(jī)床自動化控制中的應(yīng)用,使得整個(gè)系統(tǒng)的運(yùn)行穩(wěn)定性和有效性大大提高。PLC 是一種可編程控制器件,其存儲器類型屬于可編程存儲器,完成系統(tǒng)指令下達(dá)、數(shù)據(jù)邏輯運(yùn)算、計(jì)算順序控制等功能,通過數(shù)字式的信息處理方式實(shí)現(xiàn)輸入輸出方式對相關(guān)機(jī)械的自動化生產(chǎn)控制。該控制器屬于新型的工業(yè)控制器,既能控制開關(guān)量,也能控制模擬量,也可以將計(jì)算機(jī)與自動化控制技術(shù)相結(jié)合,同時(shí)利用大量的集成電路技術(shù),大大的提高整個(gè)系統(tǒng)運(yùn)行時(shí)的抗干擾性,使得系統(tǒng)持續(xù)不斷的工作,從而提高生產(chǎn)效率,PLC集成體積小,編程簡單,適應(yīng)性強(qiáng)等特點(diǎn),使得 PLC在機(jī)械工業(yè)中的使 用 范 圍 越 來 越 廣,同 時(shí) 對 復(fù) 雜 的系統(tǒng)進(jìn)行綜合梳理并對系統(tǒng)實(shí)現(xiàn)控制。
1、PLC數(shù)控系統(tǒng)
1.1、PLC硬件框架
PLC數(shù)控系統(tǒng)相較于傳統(tǒng)的計(jì)算系統(tǒng)具有對周圍環(huán)境適應(yīng)性強(qiáng)、程 序 語 言 識 別 速 度 快 和 系 統(tǒng) 編 程 穩(wěn) 定 性 好 等 特點(diǎn),同時(shí) PLC數(shù)控系統(tǒng)在實(shí) 際 的 生 產(chǎn) 過 程 中 對 硬 件 接 口 具有較高的適應(yīng)性。因此,對于數(shù)據(jù)控制單元由系統(tǒng)內(nèi)的硬件組成和用戶使用環(huán)境構(gòu)建,二者相互聯(lián)系,組成了 PLC 數(shù)控系統(tǒng)的基礎(chǔ)單元結(jié)構(gòu),如圖1所示。
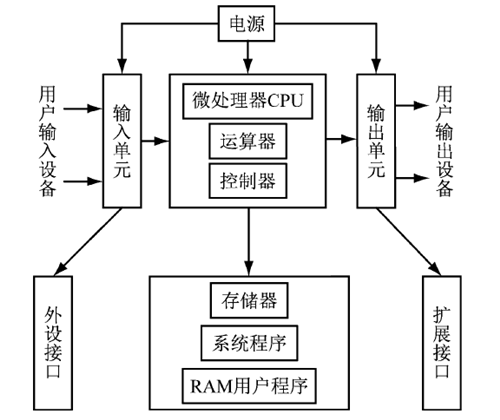
圖1 PLC硬件組成框架
PLC硬件組成框架主要由內(nèi)設(shè)接口和外部接口兩大部分構(gòu)成,其中內(nèi)設(shè)接口包括用戶輸入單元、用戶輸出單元、微處理器 CPU、運(yùn)算器和控制器,當(dāng)輸入單元和控制單元接通電源后,輸入單元采集用戶的設(shè)備的基本信息,以電信號的形式傳輸?shù)娇刂茊卧?jīng)過微處理器 CPU 對接收信號分析和運(yùn)算器綜合計(jì)算,以數(shù)字信號的形式傳輸?shù)娇刂茊卧瑢鬏斝盘栠M(jìn)行編碼解析,最后輸出至用戶設(shè)備;系統(tǒng)內(nèi)的輸入單元對應(yīng)外設(shè)接口,輸出單元對應(yīng)擴(kuò)展接口,同時(shí),在外設(shè)單元中還包含存儲器、系統(tǒng)程序、RAM 用戶 程 序。以上單元接口在系統(tǒng)程序的控制下,可以將用戶的信息進(jìn)行及時(shí)存儲,在運(yùn)算的過程中對程序的正確性對照檢查,保障內(nèi)部構(gòu)件的準(zhǔn)確性和完整性,最后將運(yùn)算的程序存儲于系統(tǒng)的結(jié)構(gòu)單元,并將用戶的信息在存儲設(shè)備識別并讀取,通過編譯器將程序信號轉(zhuǎn)化為數(shù) 據(jù) 信 號,以 此 實(shí) 現(xiàn) PLC 數(shù) 控 系 統(tǒng) 的全部功能。
1.2、數(shù)控系統(tǒng)構(gòu)成
數(shù)字控制(Numerical Control)對于以數(shù)字化的信號對機(jī)床的運(yùn)行和使用實(shí)現(xiàn)控制。其數(shù)控機(jī)床的主要構(gòu)成部分由程序介質(zhì)、數(shù)控裝置、伺服系統(tǒng)以及機(jī)床主體四部分組成,如圖2所示。
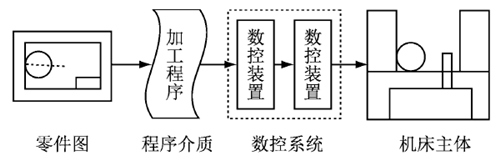
圖2 數(shù)控機(jī)床的組成
加工編碼是將零件加工程序使用相應(yīng)的格式和代碼存儲在一種程序載體上,同不同類別數(shù)控機(jī)床進(jìn)行對比,將這些程序 信 息 輸 入 到 CNC(Computer Numerical Control)單元。數(shù)控系統(tǒng)包括數(shù)控裝置和伺服系統(tǒng)。其中數(shù)控機(jī)床的主要組成部分是主控裝置,采用多個(gè)微處理器的 CNC 裝置,根據(jù)輸入數(shù)據(jù),對所有需要輸出的零部件采用編碼處理;伺服系統(tǒng)是 PLC系統(tǒng)中處 于 核 心 位 置,實(shí) 現(xiàn) 數(shù) 控 機(jī) 床 的 進(jìn)給伺服控制和主軸伺服控制。機(jī)床主體就是為了加工零件,是數(shù)控機(jī)床的主要部分,包括機(jī)體、主軸箱、刀架等機(jī)件。其作用是處理各 種 原 材 料,按 照 預(yù) 設(shè) 的 零 件 構(gòu) 圖 進(jìn) 行 加 工 設(shè)計(jì)。在實(shí)際的數(shù)控機(jī)床運(yùn)行過程中,很有可能會發(fā)生緊急突發(fā)的狀況,操作人員的失誤可能導(dǎo)致整個(gè)生產(chǎn)的失誤。在數(shù)控機(jī)床的自動控制系統(tǒng)中,為了避免突發(fā)事件,會增加圖書的設(shè)計(jì)結(jié)構(gòu),比如緊急按鈕和導(dǎo)程等部件。
2、系統(tǒng)參數(shù)計(jì)算
機(jī)床運(yùn)動參數(shù)計(jì)算是系統(tǒng)正常運(yùn)行的保障,針對機(jī)床的參數(shù)計(jì)算需要掌握其重要的部件,機(jī)床中的滾動軸是正常穩(wěn)定運(yùn)轉(zhuǎn)不可或缺的部分,常規(guī)滾動軸的軸心分別朝向固定面板的兩端,從而確保運(yùn)行平穩(wěn),PLC 系統(tǒng)的機(jī)床涉及的參數(shù)種類多,需要對重要的參數(shù)進(jìn)行計(jì)算并比較,為機(jī)床及時(shí)檢修提供數(shù)據(jù)支撐。
機(jī)床滾動軸的重要指標(biāo)是導(dǎo)程,在機(jī)床設(shè)計(jì)過程中根據(jù)接觸表面的光滑程度來制定適合的機(jī)床部件,例如結(jié)合材料力學(xué)選取符合要求的物理參數(shù),將參數(shù)類型進(jìn)行歸整,作為PLC的數(shù)控機(jī)床生產(chǎn)的重要指標(biāo)。滾動軸的導(dǎo)程由電機(jī)運(yùn)轉(zhuǎn)速度和移 動 桿 的 轉(zhuǎn) 動 速 度 決 定,當(dāng) 電 機(jī) 運(yùn) 轉(zhuǎn) 速 度 越 高時(shí),導(dǎo)程的數(shù)值越小;當(dāng)機(jī)床移動桿的轉(zhuǎn)動速度越大時(shí),導(dǎo)程的數(shù)值越小。滾動軸導(dǎo)程的計(jì)算公式如式(1)。
式中:Nmax為電機(jī)運(yùn)轉(zhuǎn)速度,單位為 m/s;Vmax為移動桿轉(zhuǎn)動速度,單位為 m/s;i為傳動比,這里取值為1;Q 為滾動軸的導(dǎo)程。
數(shù)控機(jī)床滾動軸不同的安裝方法,其在接觸面的受力也不盡相同,結(jié)合機(jī)床構(gòu)造和工程力學(xué),最小安裝直徑受電動機(jī)的運(yùn)轉(zhuǎn)速度、使用材料的伸縮程度、轉(zhuǎn)動桿的承受荷載和固定端到自由端的距離決定的,其計(jì)算公式如式(2)。
式中:V 為電動機(jī)的運(yùn)轉(zhuǎn)速度,單位為 m/s;δm為材料的伸縮程度;F 為轉(zhuǎn)動桿 的 承 受 荷 載,單 位 為 N;LC為 固 定 端 到 自由端的距離,單位為 m。
數(shù)控機(jī)床在運(yùn)行過程中,需要對其運(yùn)行荷載 進(jìn) 行 計(jì) 算。如果接觸面的承受荷載遠(yuǎn)大于它的運(yùn)行荷載時(shí),就會出現(xiàn)不平穩(wěn)運(yùn)行,甚 至 產(chǎn) 生 安 全 事 故。因此計(jì)算數(shù)控的運(yùn)行荷載非常重要,該荷載主要由轉(zhuǎn)動軸的穩(wěn)定系數(shù)、材料的彈性模量、移動桿的慣性矩、轉(zhuǎn)動軸的移動距離決定,數(shù)控機(jī)床運(yùn)行荷載的計(jì)算公式如式(3)。
式中:PK為 運(yùn) 行 荷 載,單 位 為 N;FK為 轉(zhuǎn) 動 軸 的 穩(wěn) 定 系 數(shù)(雙軸時(shí)為2,單軸時(shí)為1);E 為材料的彈性模量,單位為 Pa;I為移動桿的慣性矩,單位為 m2;L 為轉(zhuǎn)動軸的移動距離,單位為 m。
3、嵌入式PLC控制系統(tǒng)
嵌入式 PLC系統(tǒng) 的 內(nèi) 部 硬 件 結(jié) 構(gòu) 有 著 較 大 的 差 別,結(jié)合硬件結(jié)構(gòu)的不同屬性,嵌 入 式 PLC 系 統(tǒng) 按 照 組 成 結(jié) 構(gòu) 不同可分為:傳統(tǒng) PLC控制方案、內(nèi)置控制器運(yùn)行方案和計(jì)算機(jī)通信接口控制方案,根據(jù)方法和過程不同控制方案如下:
(1)傳統(tǒng) PLC控制方案
傳統(tǒng) PLC控制方 案 中 是 以 計(jì) 算 機(jī) 為 基 礎(chǔ),將 運(yùn) 算 程 序以系統(tǒng)的組成部分為單元,固定在系統(tǒng)的硬件結(jié)構(gòu)中,如圖3所示。

圖3 傳統(tǒng) PLC系統(tǒng)結(jié)構(gòu)框架
PLC運(yùn)行系統(tǒng)與 PLC開發(fā)系統(tǒng)以信號交互形成通信體系,結(jié)合系統(tǒng)的使用要求對在計(jì)算機(jī)平臺編寫的程序代碼,以數(shù)據(jù)信號的形式傳輸?shù)较乱粋€(gè)接口處,并實(shí)現(xiàn)系統(tǒng)數(shù)據(jù)控制和程序運(yùn)行。
(2)內(nèi)置控制器運(yùn)行方案
內(nèi)置控制器是 PLC 系 統(tǒng) 獨(dú) 立 的 組 成 部 分,該 系 統(tǒng) 的 重要組成部分為微型處理器,主要實(shí)現(xiàn)在指定系統(tǒng)中完成信號接收、數(shù)據(jù)分析及代碼編譯,以系統(tǒng)硬件組成的方式嵌入在系統(tǒng)結(jié)構(gòu)中,實(shí)現(xiàn)控制系統(tǒng)信號交互及數(shù)據(jù)通信等功能,如圖4所示。

圖4 內(nèi)置控制器結(jié)構(gòu)框架
在 PLC運(yùn)行系統(tǒng)中嵌入式控制器與 PLC開發(fā)系統(tǒng)實(shí)現(xiàn)數(shù)據(jù)通信功能,根據(jù)開發(fā)系統(tǒng)和運(yùn)行系統(tǒng)分析,在標(biāo)準(zhǔn)的通信協(xié)議下完成交互信號與運(yùn)行系統(tǒng)和數(shù)據(jù)接口準(zhǔn)確對接,實(shí)現(xiàn)數(shù)據(jù)信號實(shí)時(shí)交互。
(3)計(jì)算機(jī)通信接口控制方案
在計(jì)算機(jī)通信接口控制系統(tǒng)的硬件部分主要由控制計(jì)算機(jī)、系統(tǒng)總線 接 口 和I/O 接 口 組 成。PLC 開發(fā)系統(tǒng)和運(yùn)行系統(tǒng)根據(jù)網(wǎng)絡(luò)I/O 接口 進(jìn) 行 數(shù) 據(jù) 交 互,同 時(shí) PLC 運(yùn) 行系統(tǒng)與I/O 接口和系統(tǒng)總線接口實(shí)現(xiàn)信號傳遞,以上結(jié)構(gòu)單元組建控制計(jì)算機(jī)與網(wǎng)絡(luò)接口完成信號控制。計(jì)算機(jī)通信接口框架結(jié)構(gòu),如圖5所示。
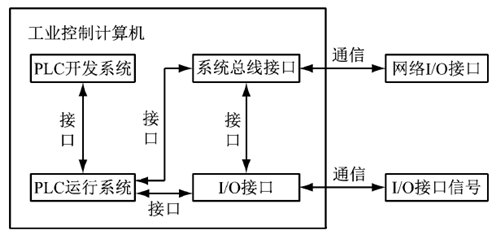
圖5 計(jì)算機(jī)通信接口結(jié)構(gòu)框架
4、基于PLC的控制系統(tǒng)設(shè)計(jì)
4.1、基本功能
PLC技術(shù)相對于傳統(tǒng)的控制技術(shù)擁有特殊的功能,在系統(tǒng)組成部分擁有多項(xiàng)的基本功能,其基本功能如下。
1)PLC技術(shù)以強(qiáng)化邏輯運(yùn)算功能為目標(biāo),功能介于中心主要數(shù)據(jù)控制和配電裝置核心功能相互轉(zhuǎn)化;
2)有專一的存儲用戶程序的存儲器,對復(fù)雜的控制對象以及控制邏輯更靈活,其用戶程序采用的邏輯順序關(guān)系和傳統(tǒng)的繼電器電路十分相似的梯形圖形編輯;
3)PLC可以和多種外部的設(shè)備進(jìn)行連接,更方便的實(shí)現(xiàn)程序的顯示、編輯等功能;
4)PLC具有較高的抗干擾能力,體積小,摒棄了傳統(tǒng)繼電器的接觸不良、磨損等特點(diǎn);
PLC技術(shù) 在 實(shí) 際 的 生 產(chǎn) 中 起 到 了 重 大 的 作 用。采 用PLC的數(shù)控機(jī)床機(jī)構(gòu)更加緊湊,功能更加豐富,在自動化程度較高的生產(chǎn)制造系統(tǒng)和加工設(shè)備中,PLC是一種不可或缺的控制裝置。
4.2、PLC控制系統(tǒng)組成
PLC采用典型的計(jì)算機(jī)結(jié)構(gòu),由 CPU、輸入、輸出接口電路、讀寫存儲器等,該系統(tǒng)可以看成由變量的信號輸入和信號輸出變量組成,此時(shí)的 PLC 相當(dāng)于一個(gè)中間處理器,將輸入的 變 量 經(jīng) 過 一 定 的 編 程 程 序 的 處 理 以 得 到 輸 出 變量。其控制結(jié)構(gòu)圖,如圖6所示。
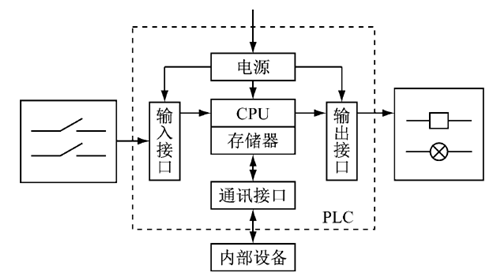
圖6 PLC系統(tǒng)基本功能框架圖
輸入部分 此 部 分 的 輸 入 端 子 與 按 鈕 開 關(guān)、液 位 報(bào) 警 開關(guān)、壓力檢測開關(guān)等連接,主要用來收集系統(tǒng)中的各種實(shí)際數(shù)據(jù),以重復(fù)掃描的方式進(jìn)行用戶程序的執(zhí)行,并按照程序事先編寫好的地址將輸入信號讀入輸入映像寄存器中并執(zhí)行,程序執(zhí)行過程中,以掃描周期為周期進(jìn)行獲取輸入數(shù)據(jù)。控制部分此部分按照被控對象的實(shí)際控制要求所編寫的用戶程序進(jìn)行反復(fù)執(zhí)行,并按照順序進(jìn)行掃描執(zhí)行,并將執(zhí)行結(jié)果寫入有關(guān)輸出映像的寄存器中。輸出部分該部分的輸出端子與接觸器、三色警報(bào)、驅(qū)動使能等連接,是電路的輸出狀態(tài),用于控制被控制對象的動作操作。根據(jù)所設(shè)計(jì)需要的輸出模式,完成指定的操作,并將輸出映像寄存器中的狀態(tài)轉(zhuǎn)移到輸出鎖存寄存器中,實(shí)現(xiàn)外部負(fù)載。
4.3、PLC模塊化設(shè)計(jì)
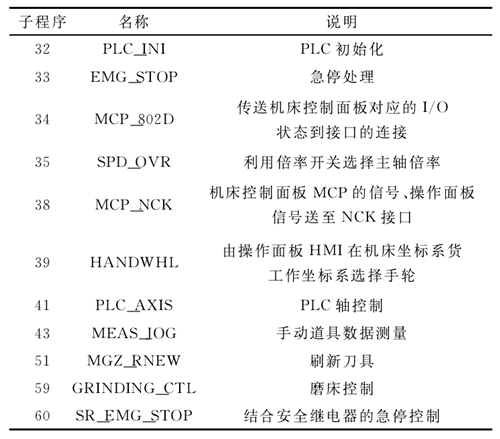
本次設(shè)計(jì)中,將 PLC模塊劃分為5個(gè)模塊,公共信號模塊、基本控制 模 塊、刀 架 模 塊、主 軸 模 塊 和 報(bào) 警 模 塊。其中公共信號模塊的主要作用是將 PLC 和 NC 之間的信號進(jìn)行相應(yīng)的處理;基本控制模塊的主要作用是程序的啟停、緊急處理等;刀架模塊主要是實(shí)現(xiàn)選擇合適的刀架、以及對刀架的定位等邏 輯 控 制 功 能;主 軸 模 塊 主 要 是 對 主 軸 的 正 反轉(zhuǎn)、主軸定位等進(jìn)行控制,并通過 PLC 的編程實(shí)現(xiàn)參數(shù)的修改等;警報(bào)模塊主要是機(jī)床的故障、人為誤操作等進(jìn)行檢測并同時(shí)給以反饋警報(bào)信息等。該模塊的功能實(shí)現(xiàn)可以通過一個(gè)主程序以及若干的子程序一起完成,實(shí)現(xiàn)對機(jī)床的各種控制作用,其主要的子程序結(jié)構(gòu),如表1所示。
數(shù)控機(jī)床中 PLC 技術(shù) 的 實(shí) 現(xiàn) 的 基 礎(chǔ) 就 是 程 序 指 令,相應(yīng)的指令會將信號和程序納入控制體系中。PLC 技術(shù)的運(yùn)用,可以實(shí)現(xiàn)整個(gè)控制系統(tǒng)的升級以及改進(jìn),在實(shí)際的運(yùn)行過程中實(shí)現(xiàn)高效率的數(shù)控機(jī)床控制,并對該系統(tǒng)結(jié)構(gòu)進(jìn)行不斷地優(yōu)化,從而升級數(shù)控機(jī)床的控制性能。
表1 主要子程序庫結(jié)構(gòu)
5、總結(jié)
在我國經(jīng)濟(jì)和社會的快速發(fā)展中,對數(shù)控機(jī)床的需求不斷的提高,而 PLC在數(shù)控機(jī)床中的應(yīng)用,不僅大大的提高了整個(gè)系統(tǒng)的生產(chǎn)效率,而且有效的實(shí)現(xiàn)數(shù)控機(jī)床的自動化控制,對提高企業(yè)的經(jīng)濟(jì)效益有很大的益處。結(jié)合當(dāng)今數(shù)控系統(tǒng)的特點(diǎn),要不斷地改善 PLC的功能,特別是完善和改善上位機(jī)軟件的功能,以及對數(shù)控系統(tǒng)編程語言的進(jìn)一步統(tǒng)一,這些問題的解決,會使得我國數(shù)控系統(tǒng)性能得到很大的提升。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年10月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2028年8月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別