


復(fù)雜流道電火花加工中的擺動進給
2016-12-16 來源:上海航天設(shè)備制造總廠 作者:劉曉 王曉娟 趙萬生 王煒 陳風(fēng)帆
摘要:葉輪類零件復(fù)雜流道電火花加工中普遍存在整體效率較低、加工狀態(tài)不穩(wěn)定的情況。提出了電極擺動進給策略,通過調(diào)整電極進給各階段位姿,改善了加工區(qū)域前端工作液流場,擴大了加工過程中的蝕除產(chǎn)物排出空間。流道加工試驗證明了擺動進給可有效改善加工穩(wěn)定性,提高整體加工效率。
關(guān)鍵詞:擺動進給;復(fù)雜流道;電火花加工;加工效率;加工穩(wěn)定性
以閉式整體泵葉輪、渦輪盤為代表的葉輪類零件復(fù)雜流道加工, 是電火花加工的一種重要應(yīng)用,其核心是成形電極沿預(yù)先規(guī)劃的路徑進給,然后進行拷貝加工[1]。由于復(fù)雜流道彎曲狹窄,成形電極在進給過程的大部分階段,其加工狀況均類似深盲孔加工,沖液措施無法將工作液有效噴入,難以將蝕除產(chǎn)物迅速帶離電極前端的放電加工區(qū)域,因而易造成放電狀態(tài)不穩(wěn)定,產(chǎn)生拉弧、積碳等現(xiàn)象,嚴(yán)重影響加工效率。對此,通常采用抬刀措施以改善蝕除產(chǎn)物的排出狀況。抬刀回退可分為兩個階段:首先,電極沿原進給路徑回退一定距離,此時,純凈的工作液從流道外部進入加工區(qū)域;然后,電極再次沿進給路徑前進, 將進入的工作液壓出加工區(qū)域,蝕除產(chǎn)物隨之被帶出。然而,額外的抬刀運動勢必影響整體加工效率。實際加工經(jīng)驗表明,在閉式葉盤類零件的電火花加工中, 抬刀措施不可避免,但抬刀的周期可根據(jù)加工狀況進行調(diào)整[2]。抬刀周期過短,會影響加工效率;抬刀周期過長,則難以有效改善加工穩(wěn)定性。
圖1 是閉式整體泵葉輪流道電火花加工示意圖。在成形電極進給運動過程中,電極與葉輪之間的距離狹窄彎曲,其間距略大于放電間隙,這意味著留給蝕除產(chǎn)物排出的區(qū)域非常有限;在確保不發(fā)生干涉的前提下, 擴大電極與葉輪之間的空間,將有助于改善蝕除產(chǎn)物的排出狀況,以達到適當(dāng)延長抬刀周期、提高加工效率的目的。對此,本文提出了電極擺動進給策略。
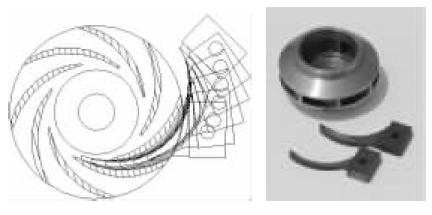
圖1 閉式整體泵葉輪電火花加工電極進給路徑
1. 電極擺動進給
電極擺動進給的目的在于擴大電極進給時其前端區(qū)域及側(cè)面區(qū)域的空間,為工作液的沖入提供空間。圖2 是電極擺動進給的流程。不失一般性,以圖1 所示電極進給運動的某階段為對象,闡述實施電極擺動進給的過程。
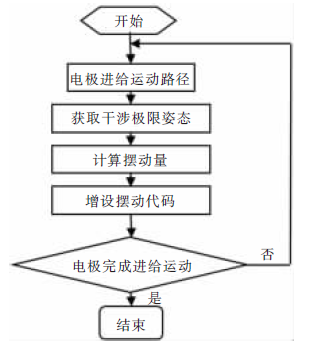
圖2 電極擺動進給運動流程圖
電極擺動進給的實施對象為描述電極運動路徑的數(shù)控代碼, 其可根據(jù)代碼行數(shù)分為若干階段。如圖3 所示,第i 階段的電極擺動進給,以該階段的電極位姿為初始狀態(tài),以電極安裝孔圓心為旋轉(zhuǎn)中心,分別向C 軸正負(fù)方向、按一定的搜索步長調(diào)整電極姿態(tài)。每一步調(diào)整后,判斷電極與葉盤的干涉狀況,分別記錄C 軸正、負(fù)方向上發(fā)生干涉時的轉(zhuǎn)角,記為β1與β2,電極擺動進給量設(shè)置為δ1=η·β1,δ2=η·β2,其中,η 為擺動進給系數(shù)(0<η<1),其數(shù)值一般根據(jù)實際加工狀況選取,通常不超過0.5。未實施擺動進給時的第i 階段的數(shù)控代碼為:
G01X(xi)Y(yi)Z(zi)C(ci)
設(shè)置進給搖動后的數(shù)控代碼為:
G01X(xi)Y(yi)Z(zi)C(ci)
G01X(xi)Y(yi)Z(zi)C(ci+δi1)
G01X(xi)Y(yi)Z(zi)C(ci-δi2)
G01X(xi)Y(yi)Z(zi)C(ci)
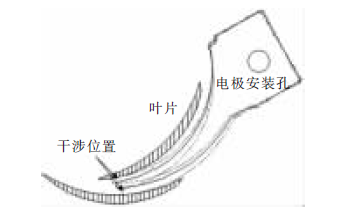
圖3 電極進給運動第i 階段的擺動進給
經(jīng)擺動進給后,電極前端及側(cè)面與葉盤的間距有所擴大,這為工作液帶離蝕除產(chǎn)物提供了較開闊的空間,有利于改善加工穩(wěn)定性和提高加工效率。
2 .電極擺動進給對極間流場的影響分析
為了更直觀地了解電極擺動進給對改善蝕除產(chǎn)物排出狀況的影響,采用計算流體力學(xué)方法分別對“無擺動進給”與“有擺動進給”兩種情況下的極間工作液流場分布進行模擬[3]。實際經(jīng)驗表明,電極抬刀回退在加工中不可避免。對于加工中的一次抬刀回退,蝕除產(chǎn)物的排出是通過抬刀的第二階段,即電極沿進給路徑再次向加工區(qū)域運動的過程中實現(xiàn)的。以抬刀的第二階段中某一時刻下,電極與工件之間的極間工作液介質(zhì)作為仿真幾何建模的對象,具體為:工件已完成第i階段加工,電極再次進給至第(i-1)階段時的位置姿態(tài)(圖4)。模型中的放電間隙設(shè)定為0.08 mm,極間工作液為液相不可壓縮流體, 密度為760 kg/m3,黏性系數(shù)為1.43×10-3 kg/(m·s);流場穩(wěn)定后處于穩(wěn)態(tài),流場物理量僅與空間坐標(biāo)有關(guān),與時間無關(guān)。
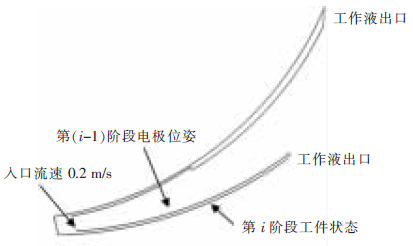
圖4 電極擺動進給流場仿真建模
抬刀的第二階段,即電極向加工區(qū)域進給過程中,其端面對極間工作液形成具有一定速度的類似活塞運動,而工作液從電極側(cè)面與工件的間隙處向外部流出。為了簡化仿真模型,對邊界條件作如下設(shè)定:以電極端面為入口,入口邊界設(shè)置為速度入口,入口速度為電極向加工區(qū)域運動的速度,設(shè)置為0.2 m/s;以葉盤兩側(cè)邊緣為出口,出口邊界設(shè)置為自由流出。極間工作液視為層流,網(wǎng)格劃分采用四邊形網(wǎng)格。圖5 是無擺動進給與有擺動進給情況下,電極完成抬刀并再次向加工區(qū)域進給時的工作液流場速度云圖。對比可見,擺動進給時,加工區(qū)域前端形成了范圍更廣泛、速度更高的渦流,有助于停留在加工區(qū)域中的蝕除產(chǎn)物獲得更高的速度,進而離開加工區(qū)域。
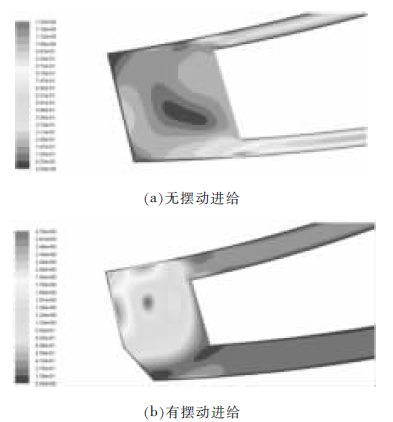
圖5 有、無擺動進給下的加工區(qū)域前端流場分布
3. 電極擺動進給驗證實驗
為了驗證電極擺動進給對復(fù)雜流道電火花加工效率及穩(wěn)定性的影響,以圖1 所示的閉式整體泵葉輪為對象,分別采用“無擺動進給”和“有擺動進給”的方式加工單個流道。為盡量消除影響加工穩(wěn)定性的因素,工件材料選用電火花較易加工的模具鋼,電極材料選用POCO EDM-C3 滲銅石墨,放電規(guī)準(zhǔn)見表1[4]。在有、無擺動進給的對比實驗中,工件、電極材料與放電規(guī)準(zhǔn)完全一致。
表1 石墨電極加工模具鋼泵葉輪的放電規(guī)準(zhǔn)
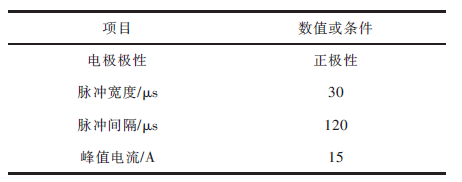
圖6 是擺動進給對泵葉輪單個流道加工穩(wěn)定性及加工效率的影響。在加工穩(wěn)定性方面,電極無擺動進給加工時,只有當(dāng)抬刀周期T 縮短至1 s 時,才能保證穩(wěn)定加工,且在電極前端出現(xiàn)明顯的積碳點。當(dāng)電極增加擺動進給后,抬刀周期T=1.5 s 即可確保穩(wěn)定加工。
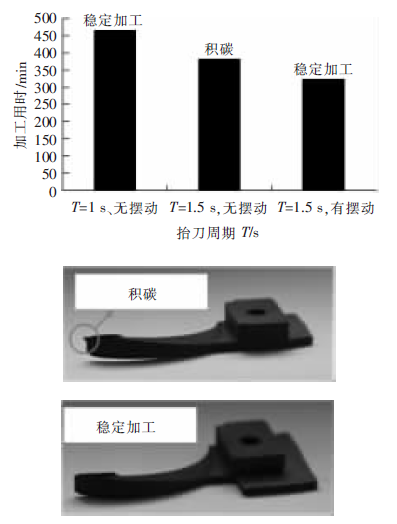
圖6 電極擺動進給對加工穩(wěn)定性及加工效率的影響
從圖6 還可看出,在加工效率方面,電極無擺動進給加工時, 抬刀周期T=1.5 s 時完成單個流道加工需耗時385 min;抬刀周期T=1 s 時加工單個流道需耗時467 min。當(dāng)電極增加擺動進給后,抬刀周期T=1.5 s 時完成單個流道加工僅需耗時326 min,與相同抬刀周期下的無擺動工況相比,加工效率提升了15.32 %,與穩(wěn)定加工的無擺動工況相比,加工效率提升了30.19 %。
為了進一步了解擺動進給對加工效率的影響,對電極進給運動過程中完成各運動階段所需的時間進行單獨分析。需要指出的是,在電極進給路徑規(guī)劃過程中,為了提高規(guī)劃效率,電極進給運動的早期,各階段間距較大;而后期電極運動空間較小時,各階段間距較小。這使得在整個電極進給運動中,完成各階段加工的用時并不相同。
圖7 是當(dāng)抬刀周期T=1.5 s 時,有、無擺動進給條件下,完成各相鄰運動階段所用的加工時間。可見,在電極進給運動的早期階段,擺動工況下的加工用時略高于無擺動工況。這是由于電極尚未深入流道,蝕除產(chǎn)物的排出并不困難,此時,擺動進給并未體現(xiàn)其功效,相反會占用一部分加工時間,影響加工效率。隨著加工的進行,電極逐漸深入流道,蝕除產(chǎn)物的排出狀況愈加惡劣,此時,擺動進給改善排屑狀況的作用開始顯現(xiàn),各階段加工效率的提升幅度隨之上升;在執(zhí)行第24 階段運動時,擺動進給對單階段加工效率的提升幅度達到最高值40.3 %。由于電極進給至第25 階段時,流道被加工通暢,蝕除產(chǎn)物的排出狀況隨即改善,此時,擺動進給對單階段加工效率的提升程度有所下降,但擺動進給工況下的加工用時仍略低于無擺動工況。
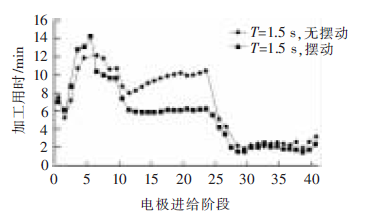
圖7 擺動對電極進給各階段加工效率的影響
4 .結(jié)語
本文針對復(fù)雜流道電火花加工中整體效率較低、加工狀態(tài)不穩(wěn)定的情況,提出了電極擺動進給策略,在避免干涉的前提下,通過調(diào)整電極進給各階段的位姿,擴大電極與工件之間供蝕除產(chǎn)物排出的空間。仿真結(jié)果顯示,擺動進給可顯著改善加工區(qū)域前端的工作液流場;閉式整體泵葉輪流道加工試驗結(jié)果表明, 擺動進給可有效改善加工穩(wěn)定性,降低對抬刀周期的依賴; 隨著電極進給的深入,擺動進給對提高加工效率的作用愈加明顯。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)