


五軸微型數(shù)控銑床結(jié)構(gòu)設(shè)計與控制系統(tǒng)研究
2018-11-30 來源: 山東理工大學(xué)機械工程學(xué)院 作者:宋嚴科,趙玉剛,趙潤
摘要: 根據(jù)高等院校學(xué)生實踐實驗要求,設(shè)計了教學(xué)型五軸聯(lián)動微型數(shù)控銑床。該銑床采用擺頭轉(zhuǎn)臺式機械結(jié)構(gòu),能夠?qū)崿F(xiàn)三維空間內(nèi)的移動以及 A 軸和 B 軸的轉(zhuǎn)動,實現(xiàn)五軸聯(lián)動的設(shè)計理念。并在此基礎(chǔ)上開發(fā)了基于 ARM 的五軸聯(lián)動微型數(shù)控銑床的運動控制系統(tǒng)。該數(shù)控系統(tǒng)采用 “PC + ARM 單片機”模式設(shè)計,上位機利用 Delphi 編程軟件實現(xiàn) NC 文檔編譯、刀具補償計算及與下位機的通信功能,下位機是以 STM32 芯片為核心的 ARM 單片機構(gòu)成,主要實現(xiàn)與上位機的通訊、插補計算及對電機的位置控制等功能。由于該數(shù)控系統(tǒng)穩(wěn)定性高、安全可靠性強及性價比高,因此非常適合高校學(xué)生實驗。
關(guān)鍵詞: 五軸聯(lián)動; 嵌入式; 數(shù)控系統(tǒng); Delphi 編程; ARM 單片機; STM32
0 前言
數(shù)控機床高速加工的運動控制是提高加工質(zhì)量和加工效率的重要手段。在現(xiàn)如今高校的工程實訓(xùn)中心中雖已廣泛增加了數(shù)控機床的實驗教學(xué),但由于所有設(shè)備大都是一些成本高的大型機床或加工中心,一般由老師演示操作,學(xué)生很難有動手的機會,更無法通過實訓(xùn)來掌握數(shù)控技術(shù)的原理。基于此,筆者開發(fā)了五軸微型數(shù)控銑床結(jié)構(gòu)和控制系統(tǒng)。該數(shù)控銑床是集教學(xué)、實驗、科研于一體的綜合實驗項目,內(nèi)容涵蓋數(shù)控銑床的結(jié)構(gòu)設(shè)計、數(shù)控系統(tǒng)硬件的設(shè)計、安裝和調(diào)試,系統(tǒng)軟件的開發(fā)及機床電器控制等相關(guān)內(nèi)容。另外,該數(shù)控系統(tǒng)操作簡單、成本低、應(yīng)用范圍廣,不僅給老師授課帶來方便,還能讓學(xué)生更好地培養(yǎng)動手操做能力,在教學(xué)領(lǐng)域具有重要意義。
1 、五軸微型數(shù)控銑床的結(jié)構(gòu)設(shè)計
五軸聯(lián)動微型數(shù)控銑床結(jié)構(gòu)上由沿 X 、Y 、Z 軸的平動和繞 X 、Y 、Z 中任何兩個軸的轉(zhuǎn)動組成,基本可分為 3 種形式: 雙擺頭式、雙轉(zhuǎn)臺式和擺頭轉(zhuǎn)臺式。本文作者設(shè)計的五軸數(shù)控銑床采用擺頭轉(zhuǎn)臺式結(jié)構(gòu)如圖 1 所示 ( 總體尺寸 400 mm × 300 mm × 600mm) ,即沿 X, Y, Z 軸的移動、 繞著 Y 軸 的擺動( B) 及繞著 X 軸的轉(zhuǎn)動 ( A) 。新設(shè)計的五軸聯(lián)動微型數(shù)控銑床可以實現(xiàn)復(fù)雜曲面的加工,能夠滿足高等院校學(xué)生的實驗要求。
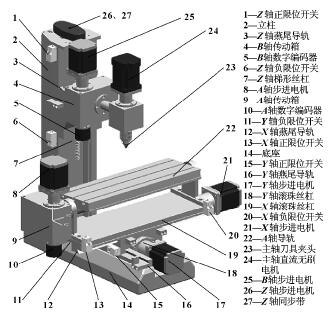
圖 1 五軸微型數(shù)控銑床結(jié)構(gòu)圖
1. 1 、直線運動模塊
直線運動單元主要有: 絲杠螺母副、齒輪齒條副、同步齒型帶等,所設(shè)計的教學(xué)型五軸微型數(shù)控機床具有結(jié)構(gòu)緊湊特點。銑床的 X、Y 軸移動采用滾珠絲杠傳動方式來保證傳動精度,Z 軸采用可以自鎖的梯形絲杠來防止主軸頭因自身重力作用而下移。由于Z 軸電機與絲杠不同軸,所以 Z 軸電機軸與絲杠軸采用傳動比為 1∶ 1 的同步帶傳動以保證傳動精度,各軸均采用步進電機驅(qū)動。
1. 2 旋轉(zhuǎn)運動模塊
五軸微型數(shù)控銑床常見的旋轉(zhuǎn)運動單元有錐齒輪傳動、蝸輪蝸桿傳動和直齒齒輪傳動等,由于蝸輪蝸桿傳動可以滿足大減速傳動比的要求,提高加工精度。因此所設(shè)計的數(shù)控銑床的轉(zhuǎn)動軸及擺動軸均采用蝸輪蝸桿傳動,傳動比為 1∶ 30,各轉(zhuǎn)動軸的行程均為 - 90° ~ 90°。由于步進電機斷電之后無法自鎖,因此選用展開螺旋角小于蝸輪蝸桿接觸摩擦角的單頭蝸桿,實現(xiàn)轉(zhuǎn)動軸的自鎖。采用分辨率為 3600 脈沖的旋轉(zhuǎn)編碼器對各轉(zhuǎn)動軸進行角度控制,控制精度為0. 1°,各轉(zhuǎn)動軸采用步進電機驅(qū)動。
2 、數(shù)控銑床控制系統(tǒng)總體設(shè)計
五軸微型數(shù)控銑床控制系統(tǒng)的總體設(shè)計如圖 2 所示,系統(tǒng)主要由系統(tǒng)硬件和系統(tǒng)軟件程序兩 部分組成。系統(tǒng)硬件部分的核心是 ARM 單片機,由單片機的獨立 I/O 口控制各軸步進電機驅(qū)動器從而實現(xiàn)各軸電機的精確轉(zhuǎn)動,利用 PWM 控制方式實現(xiàn)主軸直流無刷電機的無級變速。ARM 單片機的獨立 I/O 口可以實現(xiàn)各限位開關(guān)及編碼器的數(shù)字量輸入,從而可以避免銑床各軸由于超程而發(fā)生的危險及可以保證各轉(zhuǎn)動軸轉(zhuǎn)動的精確角度。

圖 2 五軸微型數(shù)控銑床控制系統(tǒng)的總體設(shè)計
系統(tǒng)軟件程序由上位機程序和下位機程序組成。上位機程序由 Delphi 軟件編寫,主要完成 NC 文檔的讀取、保存,刀具補償及譯碼等非實時性程序。下位機程序主要完成譯碼及插補程序,限位開關(guān)及編碼器的控制程序等,由中斷服務(wù)函數(shù)保證下位機程序的實時性。在通訊模塊中,通過設(shè)置相同的波特率等參數(shù)實現(xiàn)上位機與下位機的實時通訊。
3 、數(shù)控銑床控制系統(tǒng)硬件設(shè)計
目前數(shù)控機床應(yīng)用最為廣泛的控制系統(tǒng)主要分為以下 兩 種: 單片機控制 系統(tǒng)、運 動 控 制 卡 控 制 系統(tǒng)。運動控制卡數(shù)據(jù)處理方面雖然可以滿足微型數(shù)控銑床的需求,但因其成本高、使用不方便 ( 需要在電腦主機中插入特定的板卡) ,與本項目易操作性、性價比高等要求不符,而單片機控制系統(tǒng)擁有較強的數(shù)據(jù)處理能力,且程序編寫簡單,維護方便。因此選用單片機作為微型數(shù)控銑床系統(tǒng)硬件的核心。
3. 1 單片機芯片的選型
選用的單片機為 STM32F103RET6 為核心芯片的ARM 系列單片機作為控制系統(tǒng)。該單片機的數(shù)據(jù)存儲容量大、處理能力強,引入了嵌入式操作系統(tǒng),增加了單片機的可開發(fā)性,能夠滿足微型數(shù)控系統(tǒng)的控制要求。STM32F103RET6 微處理器是一款 32 位Coretex-M3 內(nèi) 核 處 理 器, 內(nèi) 置 高 速 存 儲 器 ( 包 括512KB 的閃存和 64KB
的 SRAM) ,可滿足數(shù)控系統(tǒng)的程序存儲及緩存運行。
單片機具有 64 個 GPIO 端口,可用于控制的獨立 I/O 口為 51 個,可以滿足微型數(shù)控銑床 5 個步進電機、1 個無刷直流電機及 6 個光電限位開關(guān)及 2 個數(shù)字編碼器的控制。
單片機的獨立I / O口的輸出脈沖頻率為 50 MHz,可以滿足步進電機和無刷直流電機的轉(zhuǎn)速要求。
3. 2 數(shù)控系統(tǒng)硬件電路設(shè)計
針對 此 數(shù) 控 系 統(tǒng) 的 功 能 要 求, 設(shè) 計 基 于STM32F103RET6 芯片的數(shù)控銑床專用單片機控制電路,此單片機電路主要由電源模塊、驅(qū)動器模塊、限位及編碼器模塊及通訊模塊組成。五軸微型數(shù)控銑床的系統(tǒng)硬件電路接線圖如圖 3 所示。
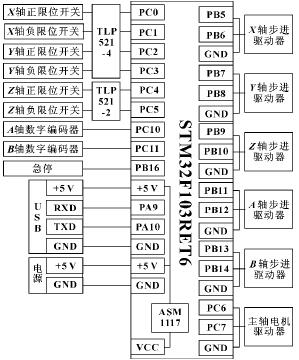
圖 3 數(shù)控系統(tǒng)硬件電路接線圖
在對單片機設(shè)計時,外部 + 5 V 電源與 USB 同時為單片機供電,以保證單片機工作時的電壓與電流需求,單片機與上位機通過串口方式進行通訊。對于五軸微型數(shù)控銑床設(shè)計時,考慮到微型數(shù)控銑床的安全,各直線運動軸都需要用到光電限位開關(guān),轉(zhuǎn)動軸需用到光電編碼器,以保證微型數(shù)控銑床在運動過程中不會發(fā)生碰撞等危險動作,保護機床和操作者的安全。
單片機通過獨立的 I/O 接口為電機驅(qū)動器提供方向與脈沖信號驅(qū)動電機轉(zhuǎn)動。
4 、數(shù)控銑床控制系統(tǒng)軟件設(shè)計
控制系統(tǒng)的軟件設(shè)計對數(shù)控銑床的精度和穩(wěn)定性有著重要影響。根據(jù)微型數(shù)控銑床控制系統(tǒng)的功能需求及結(jié)構(gòu)分析,其控制系統(tǒng)軟件主要包括以下幾個功能模塊: 用戶界面操作模塊、刀具半徑補償計算模塊、上下位機通訊模塊、譯碼插補模塊及其他模塊。五軸微型數(shù)控銑床的軟件流程圖如圖 4所示。
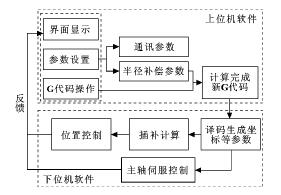
圖 4 銑床的軟件流程圖
用戶界面操作模塊: 實現(xiàn)用戶輸入數(shù)控 G 代碼、參數(shù)設(shè)置、實時坐標顯示及加工程序管理。五軸微型數(shù)控銑床的軟件主界面如圖 5 所示。
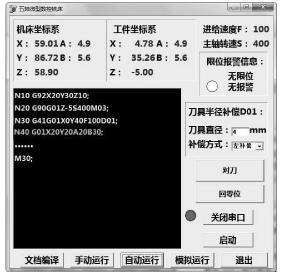
圖 5 微型數(shù)控銑床軟件界面
刀具半徑補償計算模塊: 通過讀取刀具補償參數(shù)進行單據(jù)補償計算,生成刀具補償后的 G 代碼,為銑床加工做準備。上下位機通訊模塊: 實現(xiàn) PC 機與單片機的數(shù)據(jù)傳遞。一方面將上位機的 G 代碼程序、開關(guān)狀態(tài)等數(shù)據(jù)傳遞給單片機控制銑床電機驅(qū)動器; 另一方面,監(jiān)測單片機數(shù)據(jù)運行狀態(tài),使 PC 機對數(shù)控銑床的狀態(tài)保持實時監(jiān)控。譯碼插補模塊: 對上位機傳遞的程序進行譯碼分析,確定銑床運行方式、進給速度等參數(shù)及計算交點坐標,進行插補計算確定銑床的運行軌跡。其他模塊: 主要對收集的光電限位開關(guān)、數(shù)字編碼器及急停開關(guān)信號進行處理與分析,保證銑床的行程及安全運行。
5 、結(jié)論
根據(jù)高等學(xué)校學(xué)生實驗要求,設(shè)計了教學(xué)型五軸微型數(shù)控銑床。此微型數(shù)控銑床功能齊全,可以完全滿足復(fù)雜曲面的加工。并對五軸微型數(shù)控銑床各個運動單元進行了設(shè)計以保證數(shù)控銑床的運動精度和穩(wěn)定性。最后對微型數(shù)控銑床的控制系統(tǒng)進行了研究,以單片機作為控制系統(tǒng)的核心,通過控制 5 個步進電機驅(qū)動器和主軸伺服驅(qū)動完成對數(shù)控銑床的控制,并對控制系統(tǒng)的各個模塊進行了設(shè)計。實驗表明,以單片機為控制系統(tǒng)的五軸微型數(shù)控銑床具有較高的精度和穩(wěn)定性。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年10月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2028年8月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)