


多臺銑床與柔性基礎耦合振動主動控制實驗研究
2019-10-24 來源:華北理工大學 北京科技大學 作者:楚京 龍海洋 裴未遲 張碩 葉曉蒙
摘要:針對數控銑床安裝上樓時與樓板耦合振動問題展開研究。為了建立符合研究的實驗模型,首先采用3個鑄鋼質量塊模擬3臺銑床,用四邊簡支柔性板模擬柔性基礎;然后利用 Lab VIEW 圖形化編程軟件對基本流程進行程序設計,建立實驗的軟件系統,進而實現不同參數下的振動控制;最后運用最優控制方法進行控制系統的設計。實驗結果表明:應用壓電陶瓷作動器對實驗系統實施振動主動控制的方案可行,且效果明顯。多點激勵的振動實驗不僅控制效果良好,同時也應該是當今振動實驗技術的發展方向。
關鍵詞:主動控制;柔性基礎;銑床;耦合
隨著數控銑床的廣泛應用,以及多層廠房的不斷興建,械設備安裝上樓成為發展趨勢,從而導致數控銑床與樓板耦合振動問題日益突出。很多機械設備在操作、運輸以及維護維修時都會產生振動,且產生的振動并不是單一的,是比較復雜的振動。
以前所進行的實驗研究都是針對單一的振動,很多問題不能解決,有一定的局限性,因為沒有考慮各機械設備之間的振源耦合特性和動態耦合作用。故本文模擬系統結構在真實情況下的振動,進行多點激勵的振動實驗及其仿真研究 。
1 、主動隔振實驗系統設計
1.1 實驗臺搭建與實驗原理
本文搭建的主動隔振實驗系統如圖1所示,主動隔振實驗原理如圖2所示。
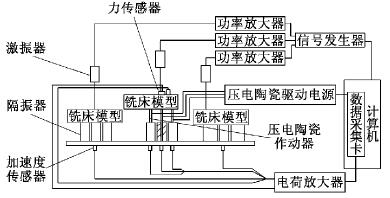
圖1 主動隔振實驗系統
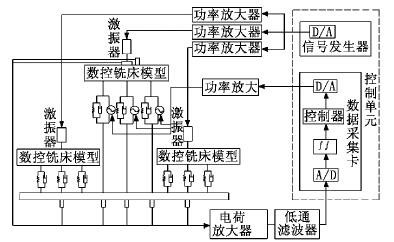
圖2 主動隔振實驗原理
在所建立的實驗臺中,有兩套激勵振動系統,第一套激勵振動系統產生符合機構振動情況的振動,應用于激勵銑床模型;另一套激勵振動系統用于驅動作動器抑制柔性基礎運動。
主動隔振實驗原理如下:信號發生器發出的信號經過功率放大器后傳輸到激振器上,然后將其發出的激勵經過一系列元件加載到薄板上,薄板上的傳感器將信號傳輸到電荷放大器,經過電荷放大器放大的信號再通過濾波器濾波,然后收集到數據采集系統;轉換的數字信號通過最優控制器的邏輯分析將信號轉換成模擬電信號,然后通過功率放大器的放大作用使作動器做出相匹配的運動,使計算機得出一些數據結果,最后再按照最優控制準則來調節作動器的動作,從而就可以抑制數控銑床的振動。
1.2 實驗模型的設計與制作
為驗證仿真模型的可靠性,進行柔性隔振系統的模型實驗。實驗系統模型如圖3所示,采用3個鑄鋼質量塊模擬3臺銑床,用四邊簡支柔性板模擬柔性基礎,3臺機床模型通過隔振系統安裝在四端簡支的矩形板上,在每臺機床上均安裝一個激振器使其振動。由于實驗條件的限制,本文僅在第二臺機床下安裝3組主被動一體隔振器,其中主動隔振器與被動隔振器并聯,第一臺和第三臺機床下均安裝3組被動隔振器。主動隔振實驗系統簡化模型如圖4所示。
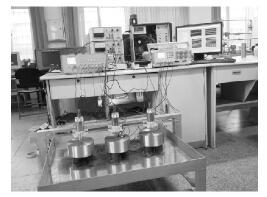
圖3 實驗系統模型
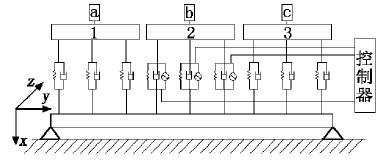
圖4 主動隔振實驗系統簡化模型
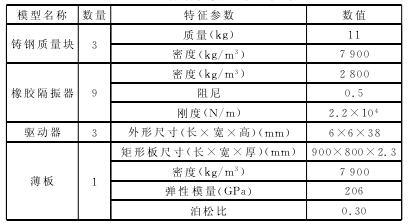
本實驗用模型來模擬實際原件,原型尺寸與質量上的比例關系符合實際原件實驗模型。主動隔振實驗系統參數見表1。
表1 主動隔振實驗系統參
2 、實驗多通道控制耦合特性描述
因為通道之間會有耦合作用,所以在對實驗進行多通道控制的過程當中需要對多個點進行控制,取其中一點c進行研究,其振動響應方程為:

當d 和d+1兩點的振動控制力在c點的作用相互抵消時,c點所受的力就會削弱,所以在主動控制作用中應考慮通道之間的耦合作用。
3 、數據采集及輸出控制系統
實驗的控制系統是由采集控制硬件和軟件構成,通過輸出控制程序獲取主動控制前、后柔性板振動狀態的數據,將數據進行對比分析來驗證控制方法的正確性。
實驗過程中,模擬信號采集、信號調理、線性二次型最優控制器以及模擬信號輸出等多個模塊也是由Lab VIEW 軟件進 行 編寫。控制系統界面如圖 5 所示,主動控制程序代碼顯示界面如圖6所示。
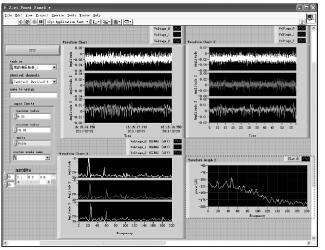
圖5 控制系統界面
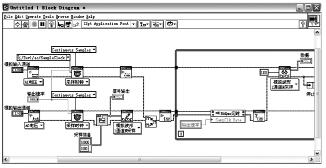
圖6 主動控制程序代碼顯示界面
圖5中,控制面板顯示了頻域內柔性基礎的振動響應、作動器的輸出電壓以及時域內作動器對應處柔性基礎的振動狀態。
4 、仿真與實驗結果分析
控制前功率流仿真曲線和實驗曲線對比如圖7所示,控制前、后功率流仿真曲線對比如圖8所示。
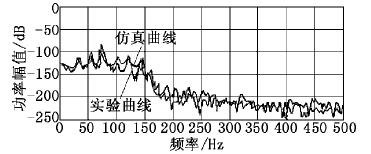
圖7 控制前功率流仿真曲線和實驗曲線對比
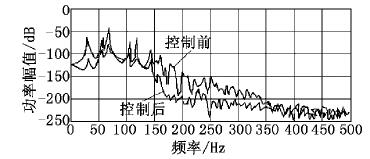
圖8 控制前、后功率流仿真曲線對比
由圖7可以看出:功率流傳遞曲線有走向平穩的趨勢,但是在反共振區域(150 Hz~300Hz)和別的地方不太一樣,傳遞到基礎上的功率流有所增加。由圖8中可以看出:中、低頻段作動力對振動控制的影響很大,功率流的傳遞效率明顯下滑,但在高頻段明顯與低頻段有所不同,主動控制力的影響逐漸下滑甚至消失(在圖中表示為控制前、后的曲線重疊),說明主動控制力對中低頻的振動控制具有良好效果,在高頻段幾乎沒有起到控制作用。加入控制后,在輸入隨機干擾信號的情況下,隔振系統位移仿真曲線與實驗曲線如圖 9 和圖 10 所示。
在輸入正弦干擾信號下,隔振系統位移仿真曲線與實驗曲線如圖11和圖12所示。通過對比圖9與圖10發現:實驗結果和仿真雖有一定誤差,但測試值和仿真值基本一致。
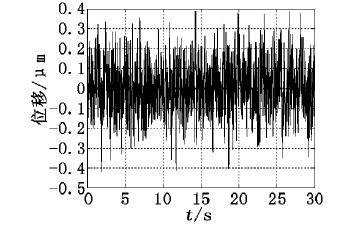
圖9 隨機干擾信號下隔振系統位移仿真曲線
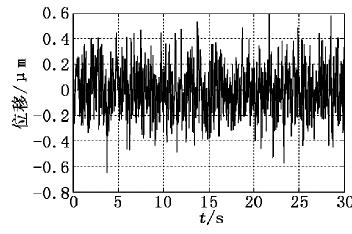
圖10 隨機干擾信號下隔振系統位移實驗曲線
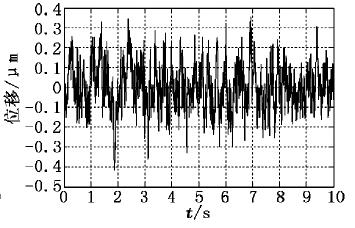
圖11 正弦干擾信號下隔振系統位移仿真曲線
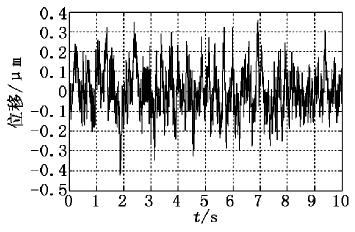
圖12 正弦干擾信號下隔振系統位移實驗曲線
5 、結語
本文從實驗的角度模擬了多臺銑床柔性基礎耦合振動控制。在實驗研究的過程當中,主動控制的方法對于控制系統的振動是很有效的,減少了由機床傳遞至基礎板的能量。通過實驗數據和仿真數據波形的對比分析,雖然兩者有一定的誤差,但整體來看,控制過程還是比較穩定的。采用最優控制的線性二次型性能指標尋求最優控制力,在中、低頻段的振動中,LQR線性二次型控制器對于控制實驗系統中的振動是很有效的,但在高頻段振動中并不是很實用,因為 LQR 線性二次型控制器對控制高頻段振動信號作用不大。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

