


機床無刷直流電機系統(tǒng)的分岔分析與控制*
2016-9-6 來源:東北電力大學(xué)理學(xué)院 作者:張中華 付景超 鄧冠男
摘要:文章主要研究了機床無刷直流電機系統(tǒng)的Hopf 分岔控制問題. 首先,對系統(tǒng)進行分岔分析,通過計算極限環(huán)曲率系數(shù)判定系統(tǒng)的Hopf 分岔類型; 然后設(shè)計Washout 濾波器對系統(tǒng)進行分岔控制,根據(jù)Hopf 分岔理論給出使原系統(tǒng)Hopf 分岔位置發(fā)生改變的參數(shù)條件,利用Normal Form 方法計算出受控系統(tǒng)的Hopf 分岔正規(guī)型,根據(jù)正規(guī)型的實部大小判定Hopf 分岔類型,給出使原系統(tǒng)Hopf 分岔類型發(fā)生改變的參數(shù)條件; 并借助MATLAB 軟件對理論結(jié)果進行數(shù)值仿真,理論結(jié)果和數(shù)值仿真表明: 控制器中的線性增益能使系統(tǒng)在所期望的參數(shù)值處發(fā)生Hopf 分岔,甚至消除Hopf 分岔,控制器中的非線性增益能改變原系統(tǒng)的Hopf 分岔類型及極限環(huán)幅值的大小. 研究結(jié)果對無刷直流電動機系統(tǒng)的工程實際具有一定的指導(dǎo)意義.
關(guān)鍵詞:Hopf 分岔, 分岔控制, Washout 濾波器, 無刷直流電機
0、引言
無刷直流電動機系統(tǒng)是集永磁同步電機、位置檢測元件和驅(qū)動控制電路于一體的機電一體化產(chǎn)品,它既具備交流電動機結(jié)構(gòu)簡單、運行可靠、維護方便等一系列優(yōu)點,又具備直流電動機運行效率高、無勵磁損耗等優(yōu)點,在伺服和驅(qū)動系統(tǒng)中得到廣泛應(yīng)用. 但在實際運行當(dāng)中,在一定的參數(shù)條件下,系統(tǒng)會出現(xiàn)分岔行為,進而導(dǎo)致混沌運動,表現(xiàn)為電流波形出現(xiàn)不規(guī)則的電流噪聲,電機轉(zhuǎn)速忽大忽小,隨機波動,電機運行性能不穩(wěn)定等. 這種混沌現(xiàn)象在機床,特別是在精密機床的傳動系統(tǒng)中是不允許出現(xiàn)的,因此對直流電機系統(tǒng)分岔、混沌及其控制方面的研究一直備受關(guān)注. 但到目前為止,大部分文獻主要集中研究非線性動力系統(tǒng)的分岔行為及混沌控制問題[1 - 2]. 文獻[3]建立了無刷直流電機的等效無量綱模型,分析了模型解的穩(wěn)定性情況. 文獻[4]在此基礎(chǔ)上進一步研究了無刷直流電機的Hopf 分岔行為和混沌現(xiàn)象,但沒有進行這方面的控制. 文獻[5 - 7]在文獻[3 - 4]的基礎(chǔ)上分別采用不同的方法對無刷直流電機的混沌現(xiàn)象進行控制,從而保證了電機運行性能的穩(wěn)定性. 但對系統(tǒng)的分岔控制沒有研究,分岔是導(dǎo)致混沌產(chǎn)生的一種途徑,對系統(tǒng)進行分岔控制有時可避免混沌的產(chǎn)生,進而減少混沌對系統(tǒng)造成的危害. 文獻[8 -10]利用這種方法對混沌系統(tǒng)進行了分岔控制.
基于上述原因,本文在文獻[4]和文獻[7]的基礎(chǔ)上,對無刷直流電機系統(tǒng)的等效非線性數(shù)學(xué)模型進行研究,首先討論系統(tǒng)的Hopf 分岔類型,然后設(shè)計washout 濾波器對系統(tǒng)的Hopf 分岔行為進行控制,進而控制混沌的產(chǎn)生,保證電機運行性能穩(wěn)定性. 主要利用Hopf 分岔理論及Normal Form 直接方法,給出原系統(tǒng)Hopf 分岔點提前、延遲或消失應(yīng)滿足的參數(shù)條件和原系統(tǒng)Hopf 分岔類型發(fā)生改變應(yīng)滿足的參數(shù)條件,并借助MATLAB 軟件對理論結(jié)果進行數(shù)值仿真,分別給出控制前、控制后的分岔圖以及分岔周期解振幅( 極限環(huán)幅值) 隨參數(shù)變化的曲線圖. 通過理論及仿真結(jié)果說明控制器的有效性.
1、系統(tǒng)分岔分析
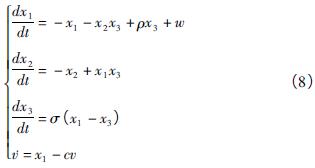
在轉(zhuǎn)子磁場定向坐標系( d - q) 中,由電壓平衡方程和轉(zhuǎn)矩平衡方程可得無刷直流電機狀態(tài)方程為[2]
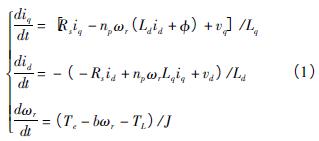
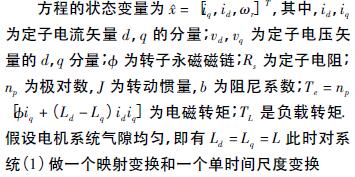
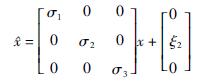
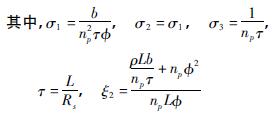
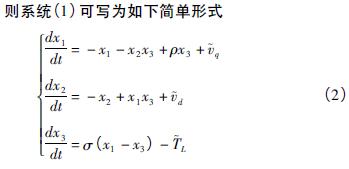
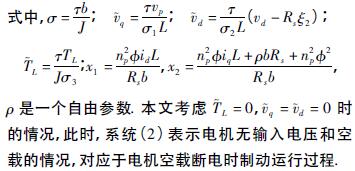


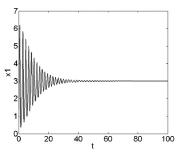
圖1 σ = 4,ρ = 10,系統(tǒng)( 2) 波形圖
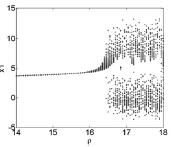
圖2 σ = 4,ρ = 16 時,系統(tǒng)( 2) 分岔圖
2、系統(tǒng)Hopf 分岔控制
取σ = 4,用washout 濾波器控制的等效無刷直流電機受控系統(tǒng)如下
x1為washout 濾波器的輸入變量,c 為濾波器時間常數(shù),c > 0 時,為穩(wěn)定的washout 濾波器,c < 0 時,為不穩(wěn)定的washout 濾波器,現(xiàn)取控制器
2. 1 線性控制部分對Hopf 分岔的影響
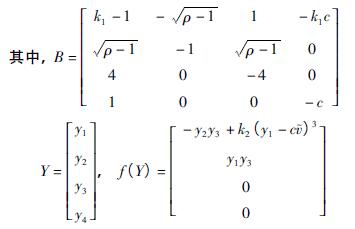
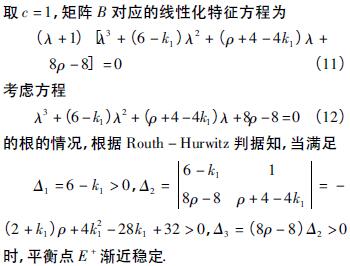
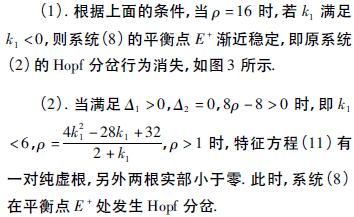
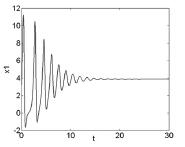
圖3 k1 = - 1,ρ = 16 時,系統(tǒng)( 8) 波形圖
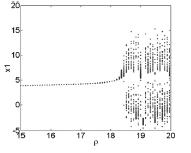
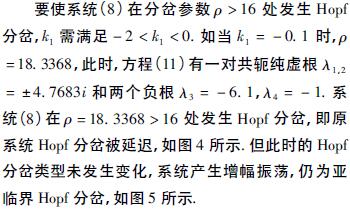
圖4 k1 = - 0. 1,ρ = 18. 3368 時,系統(tǒng)( 8) 分岔圖
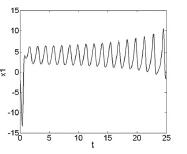
圖5 k1 = - 0. 1,ρ = 18. 3368 時,系統(tǒng)( 8) 波形圖
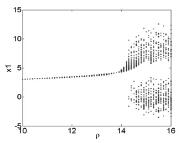
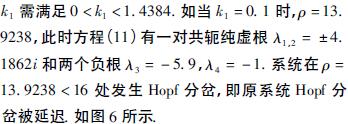
圖6 k1 = 0. 1 時,ρ = 13. 9238 時,系統(tǒng)( 8) 分岔圖
2. 2 非線性控制部分對Hopf 分岔的影響
當(dāng)取c = 1,k1 = - 0. 1 時,ρ = 18. 3368. 方程( 10) 中的線性和非線性部分分別為
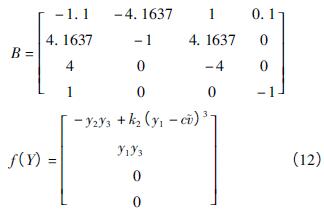
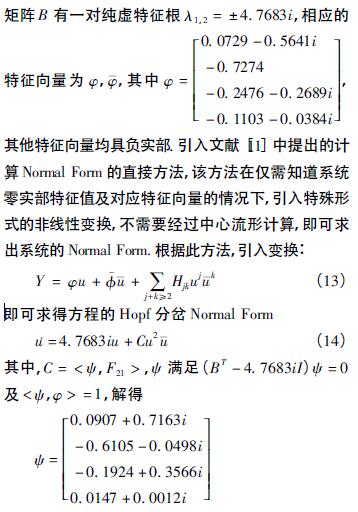
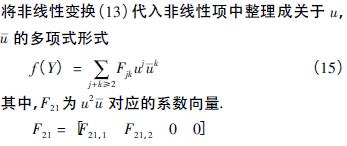

圖7 當(dāng)ρ = 18. 3368,k1 = -0. 1,k2 = -1. 5 時,系統(tǒng)⑻極限環(huán)
根據(jù)Hopf 分岔理論知,當(dāng)Re( C) <0,即k2 < - 0. 347時,系統(tǒng)( 8) 在ρ =16 處發(fā)生超臨界Hopf 分岔,即原系統(tǒng)Hopf 分岔類型被改變,不穩(wěn)定極限環(huán)變?yōu)榉€(wěn)定極限環(huán),如圖7 -8 所示. 取k1 = -0. 1,將λ 看成分岔參數(shù)ρ 的函數(shù),方程( 11) 兩邊同時對ρ 求導(dǎo),得
計算得
α'( 0) = Re( λ'( ρ) ) | ρ = 18. 3368,λ = 4. 4768i =0. 0445 >0所以,當(dāng)Re( C) <0 時,Hopf 分岔方向為ρ >16,如圖9 所示; 受控系統(tǒng)的極限環(huán)幅控關(guān)系如圖10 所示. 從圖7,圖8 及圖10 中可知,控制器的非線性部分能改變原系統(tǒng)的Hopf 分岔類型,并且分岔極限環(huán)幅值隨著非線性控制參數(shù)的增大而增大,成正比關(guān)系.
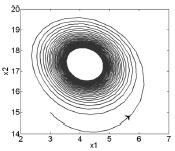
圖8 當(dāng)ρ = 18. 3368,k1 = -0. 1,k2 = -0. 1 時,系統(tǒng)⑻極限環(huán)
圖9 k1 = -0. 1,k2 = -0. 06 時,系統(tǒng)⑻分岔圖
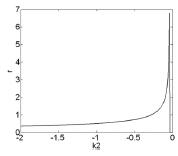
圖10 系統(tǒng)⑻的限極環(huán)幅值曲線ρ = 18
3、結(jié)論
文章主要研究了機床無刷直流電機系統(tǒng)的Hopf 分岔控制問題. 首先,研究了系統(tǒng)的分岔行為并判定系統(tǒng)的Hopf 分岔類型; 然后設(shè)計Washout濾波器對系統(tǒng)進行分岔控制,討論了控制參數(shù)對Hopf 分岔點位置,分岔類型以及極限環(huán)幅值的影響; 并借助MATLAB 軟件對理論結(jié)果進行數(shù)值仿真,理論結(jié)果和數(shù)值仿真表明: 線性控制參數(shù)能使系統(tǒng)在所期望的參數(shù)值處發(fā)生Hopf 分岔,甚至消除Hopf 分岔,非線性控制參數(shù)能改變原系統(tǒng)的分岔類型,使不穩(wěn)定極限環(huán)變?yōu)榉€(wěn)定極限環(huán),并能改變極限環(huán)幅值大小. 研究結(jié)果對無刷直流電動機系統(tǒng)的工程實際具有一定的指導(dǎo)意義.
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)