



伺服控制系統在脊柱牽引治療中的應用
2017-6-1 來源:山東省藥學科學院 作者:成志新,王京華,陳劍英,劉傳永,韓愛民,
摘要: 針對現有頸、腰椎牽引機構牽引精度低、治療效果有限的問題,我們設計了一款智能人體脊柱精準牽引治療系統,并建立了相應的伺服控制系統。系統基于“脊柱減壓”的概念設計,選ATmega16 單片機作為核心處理器,伺服電機作為動力源,利用傳感器測控技術和 ID 控制算法,將平滑隨動的牽引力精準施加于患者病變椎段,用較小的牽引力把受損椎間隙拉大,產生椎間負壓,達到治療頸、腰椎間盤突出等癥的目的。實驗結果表明,該系統牽引力跟蹤精度高、治療效果突出,具有較好的臨床使用價值。
關鍵詞: 伺服控制系統; 脊柱減壓; 隨動; 椎間負壓
1.引 言
隨著人們生活、工作方式的改變,頸、腰椎間盤突出癥已成為常見病癥。近年來文獻資料表明,將牽引治療單獨或綜合應用于椎間盤突出癥治療,多數患者癥狀有較明顯的好轉或減輕[1],成為非手術治療椎間盤突出癥的首選方法。市場上現有的牽引設備主要有快速牽引和慢速牽引兩種。快速牽引治療的原理在于瞬間牽引使椎間隙增加,椎間盤內壓下降,使突出物還納減輕對神經壓迫[2],但該類設備牽引力較大且瞬間釋放,其治療的適應癥范圍具有較大的局限性; 慢速牽引設備多采用小牽引力、多種固定模式、長時間持續作用的治療方式[3],治療過程中脊柱處于持續受力狀態,脊椎兩側肌肉產生收縮抵抗,抵消了牽引力,在療效方面尚不盡人意。近年來,國際上基于牽引治療,提出“脊柱減壓”治療的概念[4],即牽引力以特定角度施加于脊柱病變部位并在治療過程中實時調整,使脊椎兩側肌肉得到放松,允許椎間盤分離,椎間隙內產生負壓,使椎間盤突出物吸收回納的治療方法[5]。我們采用“脊柱減壓”治療的概念,設計一款新型慢速牽引系統,選用伺服電機為動力源,把傳感器測控技術和計算機控制技術運用到脊柱減壓治療系統中,實現牽引力的精確控制。
2.系統總體設計
系統主要包括四大功能模塊: 人機交互及通信模塊、核心控制模塊、伺服動力模塊、數據采集模塊。該系統的總體結構見圖 。
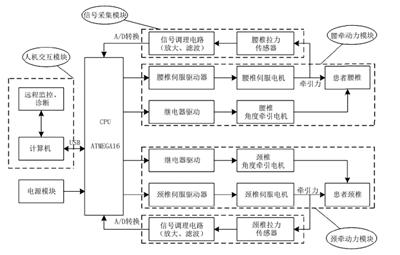
圖 1 系統結構框圖
2.1 人機交互及通信模塊
系統采用 PC 機作為上位機實現人機交互功能。上位機根據輸入的治療數據運算并生成牽引力曲線、牽引角度等參數,通過 USB 通信將相應數據傳送給微處理器,并將微處理器反饋回來的數據以曲線等形式顯示出來,以客觀顯示與預設數值的擬合程度。另外,上位機還負責網絡數據通信,將治療數據存儲于遠程數據庫中,能夠實現大容量數據存儲及訪問。
2.2 微處理器核心控制模塊
系統選用 ATmega16 單片機作為核心處理器。核心處理器將上位機傳送來的治療參數進行處理并發送指令,驅動執行機構動作,并通過讀取傳感器監測到的數據,實時對執行機構進行調整,確保實際牽引力、牽引角度等與預設數值保持一致,并將牽引力、牽引角度反饋到上位機界面進行顯示。
2.3 伺服動力控制模塊
伺服動力控制模塊是系統實現治療功能的關鍵執行部件,主要包括伺服驅動器、伺服電機、角度調節電機。伺服驅動器接受微處理器發出的運動指令,驅動交流伺服電機輸出力矩,為系統提供精準平穩的牽引力; 角度調節電機改變牽引力的施加角度,確保系統以特定角度精準作用于病變部位,避免脊柱整體受力。
2.4 數據采集模塊
數據采集模塊主要有力量傳感器、角度傳感器、信號調理電路以及 ATmega16 單片機自 帶的 A/D轉換電路組成,實現多通道數據的采集和預處理。該模塊通過力量傳感器、角度傳感器等實時采集設備運轉過程中的牽引力、牽引角度等參數,并反饋給微處理器,以便系統及時調整設備動作。
3.伺服控制系統的設計
實現牽引力的精確控制、數據采集的精確度及反饋的實時性是交流伺服控制系統的主要目標。為了減少治療過程中各種干擾信號及不確定因素的影響,提高伺服控制系統的工作精度,需要選用穩定性好、抗干擾能力強的伺服電機以及采樣精度高、靈敏度好的傳感器,并且通過 PID 控制提高整個系統的性能。
3. 1 伺服控制系統
伺服控制系統采用閉環反饋設計,主要由單片機、伺服驅動器、伺服電機、牽引力傳感器等組成,見圖 2。在各環節的協同作用下,實現牽引力的精準控制。
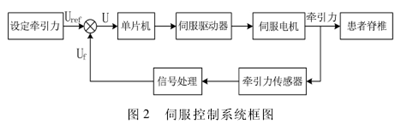
根據患者信息,上位機自動生成牽引治療曲線,設定牽引力所對應的電壓值即為系統的輸入信號Uref; 治療過程中,牽引力傳感器實時測量牽引力的大小,經濾波、放大后得到的電壓值即為系統的反饋信號 Uf; 反饋信號 Uf與設定電壓 Uref經減法運算之后形成偏差,即誤差信號 U = Uref- Uf。單片機對誤差信號 U 處理后,輸出控制信號,實時調整伺服電機的輸出轉矩,將動態隨動的牽引力施加于患者病變椎段,從而形成伺服控制系統的閉環反饋設計。系統運行過程中,要求反饋實時準確地跟蹤設定量,所以系統需要滿足調節時間小、響應速度快的特點。PID 控制算法簡單高效、參數可調,可以在實際運行中根據情況調節比例、積分、微分 3 個參數來達到較好的控制效果[6],所以我們將 PID 控制運用伺服控制系統中,以提高系統控制效果。
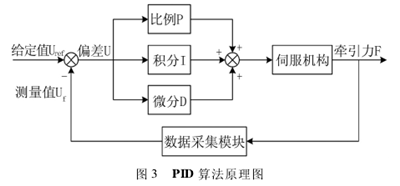
伺服控制系統 PID 算法原理圖見圖 3,系統將測得的電壓信號與給定信號進行對比,根據偏差信號 U 的大小,計算出 PID 算法中所需的 PID 參數,最終得到準確的被控量牽引力 F。
3.2 伺服動力機構的選擇
治療過程中牽引力實時跟隨設定牽引力變化,并且根據肌肉抵抗力的變化迅速做出調整,避免產生椎旁肌肉收縮或痙攣,整個閉環伺服控制系統的控制目標是將動態隨動牽引力精準施加于患者病變椎段。伺服驅動器可以使伺服電動機工作在速度模式、位置模式或者轉矩模式。轉矩模式下,通過不斷改變伺服電機的輸出轉矩可以實現脊椎牽引力的實時動態控制,另外伺服驅動器采用強健性控制技術,使得伺服電機的低速特性更佳[7],更能有效運用于脊柱減壓治療系統。
經過分析和計算,系統選用臺達交流伺服電機,通過設置伺服驅動器,使電機處于轉矩模式。伺服驅動器接收單片機傳輸的牽引力信號,通過改變伺服電機的輸出轉矩,將動態隨動的牽引力精準施加于患者病變椎段。
3.2.1 腰椎牽引機構
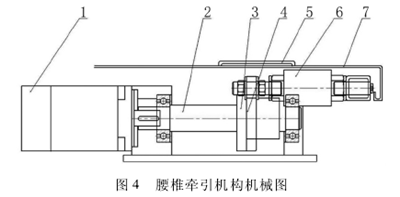
腰椎牽引機構的示意圖見圖 4,由安裝在底座上的伺服電機 1 對滾珠絲杠 2提供扭矩,通過螺母 3 帶動連接盤 4 牽引拉力傳感器 6,生成的拉力促使牽引底板 7 帶動綁帶盤 5,從而達到腰椎牽引的目的。
通過以上計算可知 T0 > T,選用該型號的伺服電機作為腰椎牽引機構,轉矩可以達到控制要求。
3.2.2 頸椎牽引機構
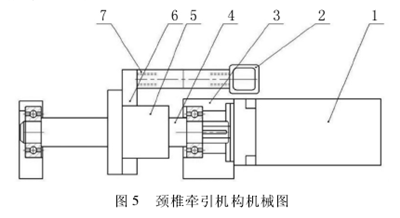
頸椎牽引機構的示意圖見圖 5,由安裝在底座 3 上的伺服電機 1 把扭矩傳遞給滾珠絲杠 4、通過螺母 5 轉換成拉力,并經連接盤6 把牽引力傳給拉力傳感器 7,從而拉動頭板 2 進行頸椎牽引治療。
頭板最大拉力 F = 25k g≈250 N,選用 2004 滾
通過以上計算可知 T0 > T,選用該型號的伺服電動機作為頸椎牽引機構,轉矩可以達到控制要求。系統的脊椎牽引機構與頸椎牽引機構均為伺服電機直接帶動絲杠,進而牽動胸板與頭板以線性拉力的形式作用于患者脊椎,這種作用方式直接、反應快,可以迅速地調整牽引力。
3.3 ADC 采樣
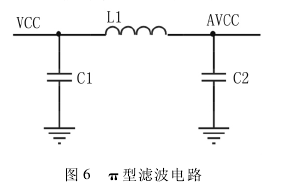
數據采集的精確度影響牽引力的跟蹤精度,從而對整個伺服控制系統的精度和穩定性造成很大的影響。ATmega16 單片機的內部 ADC 采樣精度可以達到 10 位,最大精度下可實現每秒 15 k SPS 的采樣速率,可以滿足伺服控制系統的要求。ADC 的工作電源由 AVCC 提供,AVCC 的穩定性影響 ADC 的轉換精度,系統電源 VCC 通過 π 形濾波器接入 AT-mega16 的 AVCC 引腳,這樣就能很好地抑制系統電源中的噪聲,提高 AVCC 的穩定性。圖 6 為 π 型濾波連線圖。
4 系統測試結果分析
系統根據患者體重、身高、病痛部位等生成獨特的牽引曲線,牽引曲線中的最小牽引力為最大牽引力的一半。治療過程中要求牽引力實時跟隨牽引曲線變化,我們通過臨床實驗對系統性能進行測試。
4.1 臨床實驗結果
我們選用 35 例腰椎間盤突出癥患者接受脊柱減壓系統的治療,經過 5 ~ 6 周的 20 次治療之后,有31 位患者疼痛癥狀得到不同程度的緩解,有效率可以達到 89% 。治療過程中患者對治療的耐受性較高,并且未發現不良反應。完成治療后,對其中的25 位有效治療患者進行大約半年的隨訪,超過 85%的患者腰椎狀況維持或好于治療結束時的狀態,個別患者有復發趨勢。從臨床數據可以看出,脊柱減壓伺服控制系統對于腰椎間盤突出等癥具有較好的療效。
4.2 牽引曲線
以體重 50 KG 的患者為例,系統生成的腰椎牽引曲線,最大牽引力為 200 N,最小牽引力為 100 N,患者的腰椎曲線治療界面見圖 7,上層曲線是根據患者信息生成的標準牽引曲線,下層曲線是治療過程中生成的實際牽引曲線,從圖中可以看出,實際牽
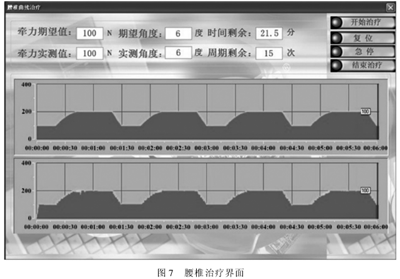
引力曲線與設定牽引力曲線擬合程度較好。圖 7 中時間 00: 00: 45 處顯示的是治療過程中患者在床體上稍微移動造成的干擾,經過伺服控制系統的及時調整,系統輸出的牽引力動態地跟蹤設定值,牽引曲線很快恢復原定軌跡。結果表明,系統動態可控性好,能夠較快的抵制干擾信號。
5.總結
本研究針對目前腰椎間盤疾病患者較多,而現有頸、腰椎牽引機構牽引精度低的問題,設計了一種基于“脊柱減壓”的新型頸、腰椎牽引治療系統,分析了系統的四大功能模塊,并重點研究了相應的伺服控制系統,從伺服動力機構、數據采集、PID 控制算法等方面提高了伺服控制系統對牽引力的跟蹤控制精度,并通過實驗對控制效果進行了說明。實驗結果表明,系統抑制患者干擾的能力和對牽引力的跟蹤精度較高,治療效果明顯,從而驗證了整個脊柱減壓伺服控制系統的精度和可行性。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

