



淺談基于 PLC 的刀庫自動換刀控制系統設計
2024-5-11 來源:- 作者:蔣繼紅 朱洪亮 等
摘要:本文主要以圓盤刀庫的機械手自動換刀控制器為主要工作目標,通過采用可編程控制器,完成了對圓盤刀庫的旋轉選刀、刀套翻轉送刀和機械手旋轉換刀程序等的自動控制。本文還著重介紹了刀具庫中刀具手動轉換控制器的基本構造、工作原理、硬件構成、軟件設計等。通過全新的換刀更換體系,可使其換刀效率大為提高,進而獲得較好的企業效益。經實踐運用證明,這種方式具有系統全面、見效快、使用廣泛的優點,各部門都可進行需要的操作,能充分滿足加工中心的需要。
關鍵詞:PCL;刀庫;自動換刀;控制系統
據統計,在入世貿組織的 20 年間,我國向海外輸送了近 60 萬臺帶有自動換刀功能的 CNC 機床,對拉動 GDP 增長和制造業發展發揮了巨大作用。自動換刀刀庫與機械制造業密不可分,隨著科學技術的發展,以高品質、高效率的機械裝置逐漸取代了常規的機床,自動化生產裝備的技術水平也在不斷地提升,這給機械制造業帶來了很大的挑戰與機會。
目前,由于數控加工中心的刀庫刀具種類比較多,它可以實現比較復雜的工件,所以它的應用范圍也變得越來越廣。不過,實際生產活動中,刀庫選刀時存在的問題也是十分廣泛的,問題的存在也給設備質量帶來了極大的困擾,希望可以給設備的保養與維護一些理論依據。本研究重點是根據江蘇德速智能工具公司的 ADKY 圓盤系列 (BT40) 刀庫,開發了一個可以精確選定刀具部位,并在該刀庫上實現速度轉換的圓盤刀庫的控制器。
1、刀庫自動換刀機械系統的基本原理
自動換刀裝置是一種以ATC 電機,雙爪機械手、氣缸、活塞桿、定位刀套、刀盤等為主要部件的裝置。其工作原理為接受指令,電機驅動,選擇下一次要加工的刀具,并在機械手的控制下,將刀具送至心軸。刀庫具有自動更換刀具和存儲刀具的功能,可根據需要對刀具進行加工,如銑、鉆、切絲、攻絲等。這樣可以縮短工作時間,節約開支。刀庫與換刀機器人要共存,沒有刀庫,就不能提前備好所需的刀具,沒有換刀機器人,就不能進行換刀。
刀具庫房中的刀具自動更換控制系統,實現了刀具的移動,刀套的翻轉,機械臂的更換。刀庫中刀具自動更換的基本工作流程如下:數控系統接收刀具更換命令,用馬達將刀具庫正向和反向選擇指定刀具號碼,圓筒推進刀杯 90°豎直向下,同一時間,將主軸提升到刀具更換的參照點,并對錠子進行定位。此時,機械臂將進行換刀,該換刀動作如下:(1)機械手旋轉夾持庫刀和主軸刀;(2)從主軸刀柄上抽出 180mm 的刀具庫刀柄; (3)操作臂 180°的轉動;(4)機器人抬起 180mm 的高度,把刀柄和心軸一起放進刀具庫里;(5)機械手對齊。
2、PLC 控制系統要求
在制造過程中,對一個零件進行加工時,常常不是一次就能完成,而是要經過多次的加工才能完成。而無論是普通的還是普通的機床,哪怕是只有一種功能的數控機床,也只能完成一種工藝。在整個加工過程中,花費的時間最多的就是更換刀具,但是,現在自動化水平越來越高,手工更換刀具已經嚴重地影響了生產的效率,因此,在加工中,自動更換刀具系統的作用是非常重要的。本設計就是為這種情況而設計的,其具體要求如下。
(1)通過自動切換系統的指令,可程控器自動選取最接近的切換路徑,使刀具庫自動旋轉。(2)待要用的刀片移至機器人拿刀處時,刀庫停止旋轉,自動比對當前刀片的編號和位置,若對,則選擇的刀片翻過來,機器人就可以隨時更換刀片;如果是錯的,那么機器就會自動停下來。(3)通過程控系統的指令,驅動自動切換馬達,使機械臂進行切換。(4)當機械臂運動至取刀位時,停止動作,程序控制系統收到指令后,自動切換馬達停止,機械臂取回刀具。(5)機械臂取出刀具后,由程控裝置再一次發出指令,機械臂繼續旋轉,旋轉至設定位置后,機械臂停止旋轉。(6)當機械臂旋轉至心軸時,程控器收到指令,自動切換馬達停止,機械臂插入刀具。(7)機械臂進行刀具的切換動作,完成了主軸刀具的切換。
當可程控器發出指令時,機械手就會動作,當動作到達設定的位置時,可程控器就會收到訊號,讓自動切換馬達停止,機械手就會停留在起始位置,從而完成切換。
3、硬件電路設計
3.1 電源電路
圖 1 顯示了控制系統的供電線路,電源為 AC 380 伏,AC 380 伏到 AC220 伏的變換要求用一臺絕緣變壓器,再經過電閘,設計用來預防電擊,并且增強了抗干擾性。這個系統是用一個程序控制裝置來控制的,它的輸入和輸出電路都是 DC24V,并選用 AC220V/DC24V 的直流電壓調節器,該穩壓器為 S-150-24V。電源指示燈會發出警告信號,當燈會亮時,表示目前已接通。
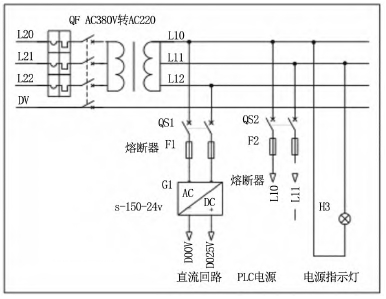
圖 1 電源接線圖
3.2 控制系統的電路設計
為了方便繪制 PLC 接線圖和編寫 PLC 程序,將每個輸入 / 輸出設備與 PLC 的輸入 / 輸出點相對應。
3.2.1 PLC 的 IO 接線
在這個設計里,首先設計了已有的 PLC 的輸入點和輸出點,接下來,按照目前的項目流程需求,為目前的設備設置了特定的 PLC 連接線,在程序設計中,這樣就可以更清楚地看到當前設備的輸入點和輸出點。
3.2.2 電機接線
三相電機運轉時,裝置的工作部件,必須使用三相電源,而且還會出問題,此時,若在裝置的進電線上加裝一組防風開關,那么在電動機發生故障的時候,而不會影響其他部件的工作,對現有設備馬達進行保護。三相電源通過交流保護空氣開關的上端進入后,把它的下端頭和 AC 接觸器的上端頭連接起來,當 220V 的電力供應完畢后。電動機在 PLC 的控制下運轉,在接觸器繞組通電和常開度連接處,電動機就能正常運轉。
4、控制系統的程序設計
4.1 程序主流程圖
按照設計要求,本文給出了該控制系統的主要程序流程圖,如圖 2 所示。
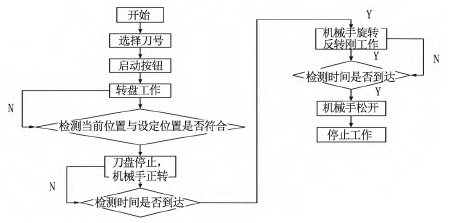
圖 2 程序主流程圖
4.2 控制系統程序設計
4.2.1 選擇刀號傳送程序
如圖 3 中所示,如果輸入繼電器 X4 被打開,則此時,它將目前的位置 2 傳遞給數據寄存器地址 D100,以執行隨后的目前的程序比較。
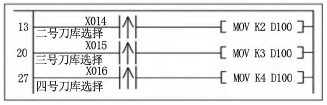
圖 3 位置傳送塊程序
4.2.2 當前刀號位置傳送程序
如圖 4 所示,在程序在向網絡 72 自動執行時,程序會自動判斷輸入繼電器 X14 的狀態,如果接受了這個任務,PLC 將常數 2 自動轉移到了目前的數據寄存器 D102 上,在同一時間內,輸入繼電器 X15 被激活,此時,數據寄存器常數 3 也被轉移到了數據寄存器 D102 中。
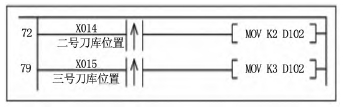
圖 4 刀庫位置傳送程序
4.2.3 電機正反轉判斷程序
在程序開始的時候,要判斷所選刀具編號 D100 和當前刀具編號 D102 的尺寸,當 D100 大于 D102 時,M10表示,把它打開,并計算其差異,然后把它放到 D300的數據寄存器里,再次判定 D300 中的數據是否大于 4,要是電機的話,然后執行一個逆向的操作,當 D102 大于 D100 時,M12 表示,在各種情況下,這將會產生非常不同的結果,結合刀庫中的刀具選擇,根據當前刀與目標刀的最短距離計算,來選擇刀具庫的正反兩面旋轉,實現了快速選擇刀具的目標。
4.2.4 機械手氣缸工作程序
在副繼電器 M1 的作用下,刀罩及機器人豎直圓柱形電磁閥啟動,從而實現刀罩的翻轉及機器人的豎直運動。當兩個人都走到了正確的位置,按下了極限開關,機器人就會從刀庫里拿出一把刀來。4s 后,機器人開始夾緊 2s,然后開始反向,放松 2s,等待主軸取刀,然后正轉回起始位置,刀套和機器人返回原位。
4.2.5 故障指示燈
如圖 9 所示,M1 開啟,意味著選擇的刀號與目標刀號重合,刀片止動,在準備更換刀具的時候,當刀套翻轉以及機械臂液壓缸的推桿在 10s 內沒有觸碰到極限開關時,這時,故障顯示燈亮起,提示員工機器出現故障。
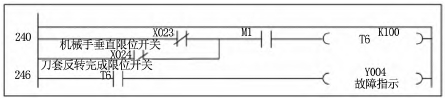
圖 5 故障指示燈
4.3 程序設計
轉刀裝置的基礎工作是轉刀。刀鞘的倒扣,就是用來抓刀的。刀套翻轉的過程是:在 PLC 的控制下,通過電磁閥的開關,帶動氣缸中的活塞旋轉,因為活塞桿連接到機器手臂的構造刀套上,這樣,活塞的移動就能使刀片翻過來。在汽缸上安裝了兩個固定開關,用來檢測汽缸中活塞的位置。由此判斷刀鞘有沒有被徹底翻轉過來。PLC 根據定位切換信號決定是否進行切換動作。根據這一步,結合系統的控制流程,編制了控制系統的梯形圖。
5、結語
本文基于可編程控制器,設計了一種基于可編程控制器的刀庫自動換刀控制系統,詳細闡述了該系統的工作原理,并進行了硬件電路的設計、可編程控制器的編程、組態軟件的設計與調試以及組態仿真軟件的運行調試,實現了快速高效的換刀,大大提高了 CNC 加工的效率。下面是從功能測試中得出的結論:
(1)優化了刀庫房自動化更換的控制邏輯,使刀具的選擇和位置更加準確,縮短更換時間,在運行中避免了一些低級的失誤;(2)本實用新型具有很好的適應性,尤其適用于多道工序,需要不斷地更換刀具的復雜工件,可減少因多次更換而引起的誤差,從而提高了加工精度;(3)該系統具有操作簡便、造價低廉、易于維護、組態接口好、工作穩定性好、抗干擾性強等優點。
作者:蔣繼紅 1,殷紅梅 1,劉曉宇 1,朱洪亮 2
來源:1. 江蘇電子信息職業學院 ;2. 漣水思麥柯動力機械有限公司 )
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

